
Электродвигатель. Виды и применение. Работа и устройство
Электродвигатель представляет электромашину, перестраивающую электрическую энергию в механическую. Обычно электрическая машина реализует механическую работу благодаря потреблению приложенной к ней электроэнергии, преобразовывающейся во вращательное движение. Ещё в технике есть линейные двигатели, способные создавать сразу поступательное движение рабочего органа.
Особенности конструкции и принцип действия
Не важно какое конструктивное исполнение, но устройство любых электродвигателей однотипное. Ротор и статор находятся внутри цилиндрической проточки. Вращение ротора возбуждают магнитное поле, отталкивающее его полюса от статора (неподвижной обмотки). Сохранять постоянное отталкивание можно путём перекоммутации обмоток ротора, или образовав вращающееся магнитное поле непосредственно в статоре. Первый способ присущий коллекторным электродвигателям, а второй — асинхронным трехфазным.
Корпус любых электродвигателей обычно чугунный или выполнен из сплава алюминия. Однотипные двигатели, не смотря на конструкцию корпуса производятся с одинаковыми установочными размерами и электрическими параметрами.
Работа электродвигателя базируется на принципах электромагнитной индукции. Магнитная и электрическая энергия создают электродвижущуюся силу в замкнутом контуре, проводящем ток. Это свойство заложено в работу любой электромашины.
На движущийся электроток в середине магнитного поля постоянно воздействует механическая сила, стремительно пытающаяся отклонить направление зарядов в перпендикулярной силовым магнитным линиям плоскости. Во время прохождения электротока по металлическому проводнику либо катушке, механическая сила норовит подвинуть или развернуть всю обмотку и каждый проводник тока.
Назначение и применение электродвигателей
Электрические машины имеют много функций, они способны усиливать мощность электрических сигналов, преобразовывать величины напряжения либо переменный ток в постоянный и др. Для выполнения таких разных действий существуют многообразные типы электромашин. Двигатель представлят тип электрических машин, рассчитанных для преобразования энергии. А именно, этот вид устройств превращает электроэнергию в двигательную силу или механическую работу.
Он пользуется большим спросом во многих отраслях. Их широко используется в промышленности, на станках различного предназначения и в других установках. В машиностроении, к примеру, землеройных, грузоподъёмных машинах. Также они распространены в сферах народного хозяйства и бытовых приборах.
Классификация электродвигателей
Электродвигатель, является разновидностью электромашин по:
- Специфике, создающегося вращательного момента:
— гистерезисные;
— магнитоэлектрические. - Строению крепления:
— с горизонтальным расположением вала;
— с вертикальным размещением вала. - Защите от действий внешней среды:
— защищённые;
— закрытые;
— взрывонепроницаемые.
В гистерезисных устройствах вращающий момент образуется путём перемагничивания ротора или гистерезиса (насыщения). Эти двигатели мало эксплуатируются в промышленности и не считаются традиционными. Востребованными являются магнитоэлектрические двигатели. Существует много модификаций этих двигателей.
Их разделяют на большие группы по типу протекающего тока:
- Постоянного тока.
- Переменного тока.
- Универсальные двигатели (работают на постоянном переменном токе).
Особенности магнитоэлектрических двигателей постоянного тока
С помощью двигателей постоянного тока создают регулируемые электрические приводы с высокими эксплуатационными и динамическими показателями.
Типы электродвигателей:
- С электромагнитами.
- С постоянными магнитами.
Группа электродвигателей, питание которых выполняется постоянным током, подразделяется на подвиды:
- Коллекторные. В этих электроприборах присутствует щёточно-коллекторный узел, обеспечивающий электрическое соединение неподвижной и вращающейся части двигателя. Устройства бывают с самовозбуждением и независимым возбуждением от постоянных магнитов и электромагнитов.
- Выделяют следующие виды самовозбуждения двигателей:
— параллельное;
— последовательное;
— смешанное. - Коллекторные устройства имеют несколько минусов:
— низкая надёжность приборов;
— щёточно-коллекторный узел довольно сложная в обслуживании составляющая часть магнитоэлектрического двигателя. - Безколлекторные (вентильные). Это двигатели с замкнутой системой, работающие по аналогичному принципу работы синхронных устройств. Оснащены датчиком положения ротора, преобразователем координат, а также инвертором силовым полупроводниковым преобразователем.
Эти машины выпускаются различных размеров от самых маленьких низковольтных до громадных размеров (в основном до мегаватта). Миниатюрными электродвигателями оснащены компьютеры, телефоны, игрушки, аккумуляторные электроинструменты и т.п.
Применение, плюсы и минусы электродвигателей постоянного тока
Электромашины постоянного тока применяют в разных областях. Ими комплектуют подъёмно-транспортные, красочно-отделочные производственные машины, а также полимерное, бумажное производственное оборудование и т.д. Часто электрический двигатель этого типа встраивают в буровые установки, вспомогательные агрегаты экскаваторов и другие виды электротранспорта.
Преимущества электрических двигателей:
- Лёгкость в управлении и регулировании частоты вращения.
- Простота конструкции.
- Отменные пусковые свойства.
- Компактность.
- Возможность эксплуатации в разных режимах (двигательном и генераторном).
Минусы двигателей:
- Коллекторные двигатели требуют трудное профилактическое обслуживание щёточно-коллекторных узлов.
- Дороговизна производства.
- Коллекторные устройства имеют не большой срок службы из-за изнашивания самого коллектора.
Электродвигатель переменного тока
В электродвигателях переменного тока электроток описывается по синусоидальному гармоническому закону, периодично меняющему свой знак (направление).
Статор этих устройств изготавливают из ферромагнитных пластинок, имеющих пазы для помещения в них витков обмотки с конфигурацией катушки.
Электродвигатели по принципу работы бывают синхронными и асинхронными. Главным их отличием является то, что скорость магнитодвижущей силы статора в синхронных приборах равна скорости вращения ротора, а в асинхронных двигателях эти скорости не совпадают, обычно ротор вращается медленнее поля.
Синхронный электродвигатель
Из-за одинакового (синхронного) вращения ротора с магнитным полем, аппараты именуют синхронными электродвигателями. Их подразделяют на подвиды:
- Реактивный.
- Шаговый.
- Реактивно-гистерезисный.
- С постоянными магнитами.
- С обмотками возбуждения.
- Вентильный реактивный.
- Гибридно-реактивный синхронный двигатель.
Большая часть компьютерной техники оснащена шаговыми электродвигателями. Преобразование энергии в этих устройствах основано на дискретно угловом передвижении ротора. Шаговый электродвигатель имеет высокую продуктивность, независящую от их мизерных размеров.
Достоинства синхронных двигателей:
- Стабильность частоты вращения, что не зависит от механических нагрузок на валу.
- Низкая чувствительность к скачкам напряжения.
- Могут выступать в роли генератора мощности.
- Снижают потребление мощности, предоставляемой электростанциями.
Недостатки в синхронных устройствах:
- Сложности с запуском.
- Сложность конструкции.
- Затруднения в регулировки частоты вращения.
Недостатки синхронного двигателя, делают более выгодным для использования электродвигатель асинхронного типа. Тем не менее, большинство синхронных двигателей из-за их работы с постоянной скоростью востребованы для установок в компрессоры, генераторы, насосы, а также крупные вентиляторы и пр. оборудование.
Асинхронный электродвигатель
Статор асинхронных двигателей представляет распределённую двухфазную, трехфазную, реже многофазную обмотку. Ротор выполняют в виде цилиндра, используя медь, алюминий либо металл. В его пазы залиты либо запрессованные токопроводящие жилы к оси вращения под определённым углом. Они соединяются в одно целое на торцах ротора. Противоток возбуждается в роторе от переменного магнитного поля статора.
По конструктивным особенностям выделяют два вида асинхронных двигателей:
- С фазным ротором.
- С короткозамкнутым ротором.
В остальном конструкция приборов не имеет отличий, статор у них абсолютно одинаковый. По числу обмоток выделяют такие электродвигатели:
- Однофазные. Этот тип двигателей самостоятельно не запускается, ему требуется стартовый толчок. Для этого применяется пусковая обмотка либо фазосдвигающая цепь. Также приборы запускаются вручную.
- Двухфазные. В этих устройствах присутствуют две обмотки со смещёнными на угол фазами. В приборе возникает вращающееся магнитное поле, напряженность которого в полюсах одной обмотки нарастает и синхронно спадает в другой.
Двухфазный электродвигатель может самостоятельно запускаться, но с реверсом присутствуют сложности. Часто этот тип устройств подключают к однофазным сетям, включая вторую фазу через конденсатор. - Трехфазные. Достоинством этих типов электродвигателей является легкий реверс. Основные части двигателя – это статор с тремя обмотками и ротор. Позволяет плавно регулировать скорость ротора. Эти приборы довольно востребованы в промышленности и технике.
- Многофазные. Состоят эти устройства из встроенной многофазной обмотки в пазах статора на его внутренней поверхности. Эти двигатели гарантируют высокую надёжность при эксплуатации и считаются усовершенствованными моделями двигателей.
Асинхронные электрические двигатели значительно облегчают работу людей, поэтому они незаменимы во многих сферах.
Достоинствами этих приборов, которые сыграли роль в их популярности, являются следующие моменты:
- Простота производства.
- Высокая надёжность.
- Не нуждаются в преобразователях для включения в сеть.
- Небольшие расходы при эксплуатации.
Ко всему этому, можно добавить относительную стоимость асинхронных приборов. Но они также имеют и недостатки:
- Невысокий коэффициент мощности.
- Трудность в точной регулировке скорости.
- Маленький пусковой момент.
- Зависимость от напряжения сети.
Но благодаря питанию электродвигателя с помощью частотного преобразователя, некоторые недостатки устройств устраняются. Поэтому потребность асинхронных моторов не падает. Их применяют в приводах разных станков в областях металлообработки, деревообработки и пр. В них нуждаются ткацкие, швейные, землеройные, грузоподъёмные и другие виды машин, а также вентиляторы, насосы, центрифуги, разные электроинструменты и бытовые приборы.
Похожие темы:
electrosam.ru
главное для хорошего электромобиля – облегчённый мотор / Habr

Дизайн автора представляет новое слово в разработке электромоторов
В первое десятилетие XX века 38% всех машин в США работали на электричестве – и этот процент упал почти до нуля с ростом доминирования ДВС в 1920-х. Сегодняшнее стремление к сохранению энергии и уменьшению вредных выбросов вдохнуло в электромобили новую жизнь, но их высокая стоимость и ограниченный пробег сдерживают продажи.
Большая часть попыток решения этих проблем связана с улучшением батареек. Конечно же, улучшение систем хранения электроэнергии, будь то батарейки или топливные ячейки, должно оставаться частью любой стратегии улучшения электромобилей, но потенциал для улучшения есть и в другом фундаментальном компоненте машин: в моторе. Последние четыре года мы работали над новой концепцией тягового электродвигателя, используемого в электромобилях и грузовиках. Наша последняя разработка сильно улучшает эффективность по сравнению с обычными моделями – достаточно для того, чтобы сделать электромобили более практичными и доступными.
В прошлом году мы доказали работоспособность нашего мотора во всесторонних лабораторных тестах, и хотя до размещения его в автомобиле ещё далеко, у нас есть все основания полагать, что там он покажет себя так же хорошо. Наш мотор сможет увеличить пробег современных электромобилей, даже если мы не достигнем никакого прогресса в технологии батарей.

Чтобы понять сложность нашей задачи, необходимо вспомнить основы схемы электромотора (ЭМ). По сравнению с ДВС ЭМ проще, у них всего несколько критичных компонентов. Механика требует наличия корпуса. Он называется статором, поскольку не двигается. Необходим ротор, вращающий вал и создающий вращающий момент. Чтобы мотор работал, статор и ротор должны взаимодействовать при помощи магнетизма, превращая электрическую энергию в механическую.
Концепции моторов отличаются именно в области магнитных интерфейсов. В коллекторных моторах постоянного тока ток течёт через щётки, скользящие по коллекторному узлу. Ток идёт через коллектор и передаёт энергию намотке на роторе. Намотка отталкивается постоянными магнитами или электромагнитами статора. Щётки, скользя по коллектору, периодически меняют направление тока, и магниты ротора и статора отталкивают друг друга снова и снова, в результате чего ротор вращается. Иначе говоря, вращательное движение обеспечивается изменяющимся магнитным полем, производимым коллектором, соединяющим катушки с источником тока и циклически меняющим направление тока при поворотах ротора. Однако эта технология ограничивает вращающий момент и страдает от изнашивания; она уже не используется в тяговых ЭМ.
В современных электромобилях используется переменный ток от инвертера. Здесь динамическое вращающееся магнитное поле создаётся в статоре, а не в роторе. Это позволяет упростить схему ротора, который обычно более сложен, чем статор, что облегчает все задачи, связанные с разработкой ЭМ.
Моторов на переменном токе бывает два вида: асинхронные и синхронные. Мы сфокусируемся на синхронных, поскольку обычно они лучше и эффективнее работают.
Передовая система охлаждения проводит жидкость непосредственно через катушку (слева), а не через кожух мотора (справа)
Синхронные моторы тоже бывают двух видов. Более популярный – синхронная машина с постоянными магнитами [permanent-magnet synchronous machine, PMSM], использующая постоянные магниты, встроенные в ротор. Чтобы заставить его вращаться, в статоре организуется вращающееся магнитное поле. Это поле получается благодаря обмотке статора, соединённой с источником переменного тока. Во время работы полюса постоянных магнитов ротора захватываются вращающимся магнитным полем статора, что и заставляет ротор вращаться.
Такая схема, использующаяся в Chevrolet Volt и Bolt, в BMW i3, в Nissan Leaf и множестве других машин, может в пике достигать эффективности в 97%. Постоянные магниты обычно делают из редкоземельных элементов; яркие примеры – очень мощные неодимовые магниты, разработанные в 1982 году General Motors и Sumitomo.
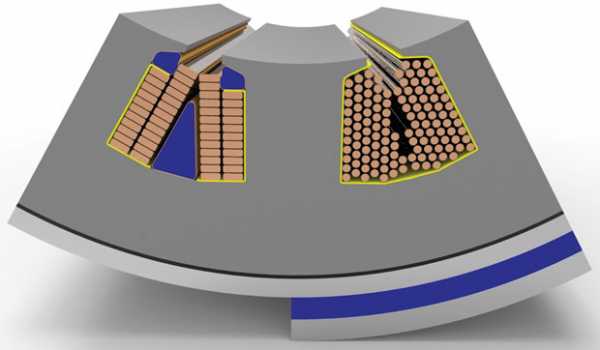
Явнополюсные синхронные электродвигатели [Salient-pole synchronous machines, SPSM)] используют внутри ротора не постоянные, а электромагниты. Полюсы – это катушки в виде труб, направленные наружу, как спицы колеса. Эти электромагниты в роторе питаются источником постоянного тока, соединённым с ними через контактные кольца. Контактные кольца, в отличие от коллектора, не меняют направление тока. Северный и южный полюса ротора статичны, и щётки не изнашиваются так быстро. Как и в случае с PMSM, вращение ротора происходит из-за вращения магнитного поля статора.
Из-за необходимости питать электромагниты ротора через контактные кольца, у этих моторов обычно чуть ниже пиковая эффективность – в диапазоне от 94 до 96%. Преимущество над PMSM заключается в настраиваемости поля ротора, позволяющая ротору более эффективно вырабатывать крутящий момент на больших скоростях. Итоговая эффективность при использовании для разгона машины возрастает. Единственный производитель таких моторов в серийных авто – это Renault с его моделями Zoe, Fluence и Kangoo.
Электромобили необходимо строить с не только эффективными, но и лёгкими компонентами. Самый очевидный способ улучшить соотношение мощности к весу – уменьшить размер мотора. Однако такая машина выдаст меньший крутящий момент для одной и той же скорости вращения. Следовательно, чтобы получить больше энергии необходимо вращать мотор на более высоких скоростях. Сегодняшние электромобили работают на 12000 об/мин; в следующем поколении появятся моторы, работающие при 20000 об/мин; уже идут работы над моторами, работающие на скорости 30000 об/мин. Проблема в том, что чем выше скорость, тем сложнее получается редуктор – скорость вращения мотора слишком сильно превышает скорость вращения колёс. Из сложности редуктора следуют большие энергопотери.
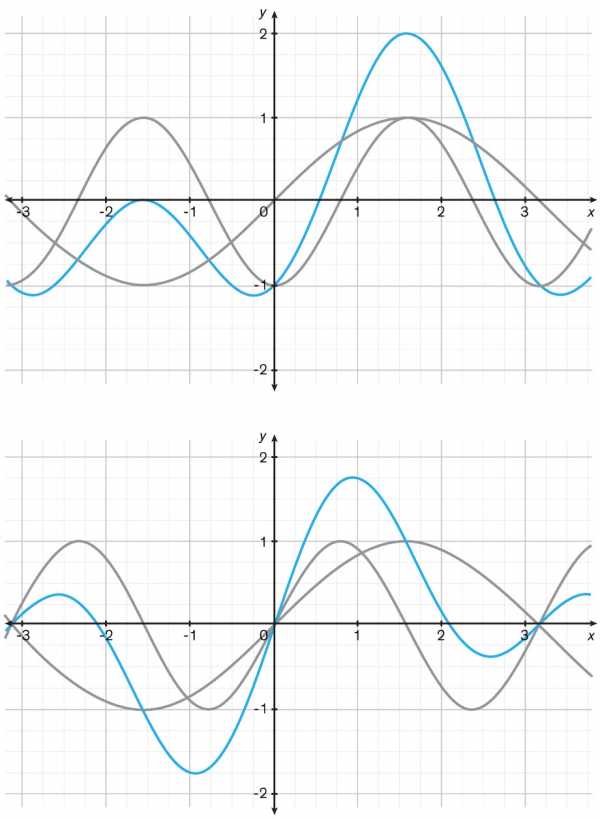
Идеальный шторм: в авторском варианте (вверху) сила Лоренца и смещённая индуктивность (серый) суммируются в максимальное общее усилие (синее) равное 2. В обычном моторе (внизу) сумма двух сил – силы Лоренца и магнитное сопротивление (серый) дают общее усилие (синий), достигающее пика лишь в 1,76, при угле выбега ротора в 0,94 рад. Разница в этом примере составляет 14%
Второй подход к улучшению соотношения мощности к весу – увеличение силы магнитного поля, что увеличивает крутящий момент. В этом состоит смысл добавления железного сердечника к катушке – хотя это увеличивает вес, но одновременно усиливает плотность магнитного потока на два порядка. Следовательно, практически все современные ЭМ используют железные сердечники в статоре и роторе.
Однако, есть и минус. Когда сила поля увеличивается до определённого предела, железо теряет возможность усиления плотности потока. На это насыщение можно немного повлиять, добавляя присадки и изменяя процесс изготовления железа, но и самые эффективные материалы ограничены 1,5 В*с/м
И, наконец, третий стандартный путь увеличения крутящего момента – усиление поля через усиление тока, проходящего через катушки. Опять-таки, тут есть свои ограничения. Увеличьте ток, и увеличатся потери на сопротивление, уменьшится эффективность и появится тепло, способное повредить мотор. Для проводов можно использовать металл, лучше проводящий ток, чем медь. Серебряные провода также бывают, но их применение в таком устройстве было бы абсурдно затратным.
Единственный практический способ увеличить ток – контролировать тепло. Передовые охлаждающие решения проводят жидкость прямо рядом с катушками, а не дальше от них, снаружи статора.
Все эти шаги помогают улучшать соотношение веса к мощности. В гоночных электромобилях, где стоимость не имеет значения, моторы могут достигать 0,15 кг на киловатт, что сравнимо с лучшими ДВС из Формулы 1.
Мы со студентами разрабатывали и создавали такие высокопроизводительные электромоторы для автомобиля, участвовавшего в студенческой Формуле три года назад. Мы создавали моторы в нашей лаборатории в Электротехническом институте Технологического института Карлсруэ. Каждый год команда создавала новую машину с улучшенным мотором, редуктором и силовой электроникой. В машине четыре мотора, по одному на колесо. Каждый имеет всего 8 см в диаметре, 12 см в длину и 4,1 кг веса, и производит 30 кВт на постоянной основе и 50 кВт в пике. В 2016 году наша команда выиграла чемпионат мира.
Так что это и правда можно сделать, если стоимость вас не волнует. Главный вопрос – можно ли использовать такие улучшающие эффективность технологии в массовом производстве, в машине, которую могли бы купить вы? Мы создали такой мотор, так что ответ на вопрос – положительный.
Мы начали с простой идеи. Электромоторы хорошо работают как в роли моторов, так и в роли генераторов, хотя для электромобилей такая симметрия не особенно нужна. Для автомобиля нужен мотор, работающий лучше в роли мотора, чем в роли генератора – последняя используется только для заряда батарей при рекуперативном торможении.
Чтобы понять эту идею, рассмотрим работу мотора PMSM. В таком моторе движение создают две силы. Во-первых, сила, возникающая благодаря постоянным магнитам в роторе. Когда ток идёт через медные катушки статора, они создают магнитное поле. Со временем ток переходит из одной катушки в другую и заставляет магнитное поле вращаться. Вращающееся поле статора притягивает постоянные магниты ротора, и тот начинает двигаться. Этот принцип основан на силе Лоренца, влияющей на движение заряженной частицы в магнитном поле.
Но современные ЭМ получают часть энергии от магнитного сопротивления – силы, притягивающей блок железа к магниту. Вращающееся поле статора притягивает как постоянные магниты, так и железо ротора. Сила Лоренца и магнитное сопротивление работают бок о бок, и – в зависимости от схемы мотора – примерно равны друг другу. Обе силы примерно равны нулю, когда магнитные поля ротора и статора выравниваются. С увеличением угла между ними мотор вырабатывает механическую энергию.
В синхронном моторе поля статора и ротора работают совместно, без задержек, существующих в асинхронных машинах. Поле статора находится под определённым углом к полю ротора, который можно регулировать во время работы для достижения наибольшей эффективности. Оптимальный угол для создания вращательного момента при заданном токе можно вычислять заранее. Затем он подстраивается, по мере изменения тока, к силовой электронной системе, дающей переменный ток на намотку статора.
Но вот, в чём проблема: при движении поля статора по отношению к положению ротора сила Лоренца и магнитное сопротивление то увеличиваются, то уменьшаются. Сила Лоренца увеличивается по синусоиде, достигающей пика на 90 градусов от точки отсчёта (от точки, в которой поля статора и ротора выровнены). Сила манитного сопротивления циклично меняется в два раза быстрее, поэтому достигает пика на 45 градусах.
Поскольку силы достигают максимума в разных точках, максимальная сила мотора меньше, чем сумма его частей. Допустим, у какого-то определённого мотора в определённый момент работы оказывается, что оптимальным углом для максимума суммарной силы будет 54 градуса. В этом случае этот пик будет на 14% меньше, чем суммарные пики двух сил. Это наилучший из возможных компромиссов данной схемы.
Если бы мы могли переделать этот мотор так, чтобы две силы достигали максимума в одной точке цикла, мощность мотора возросла бы на 14% совершенно бесплатно. Вы бы потеряли только эффективность работы в роли генератора. Но мы, как будет показано далее, нашли способ восстановить и эту способность, чтобы мотор лучше восстанавливал энергию при торможении.
Разработка идеально выравнивающего поля мотора – дело непростое. Проблема состоит в комбинации PMSM и SPSM в новую гибридную схему. В результате получается гибридный синхронный мотор со смещённой осью магнитного сопротивления. По сути, этот мотор использует как провода, так и постоянные магниты, для создания магнитного поля в роторе.
Другие пытались работать в этом направлении, а затем отбросили эту идею – но они хотели использовать постоянные магниты только для усиления электромагнитного поля. Наша инновация состоит в использовании магнитов только для придания точной формы полю, чтобы оптимально выровнять две силы – силу Лоренца и силу магнитного сопротивления.
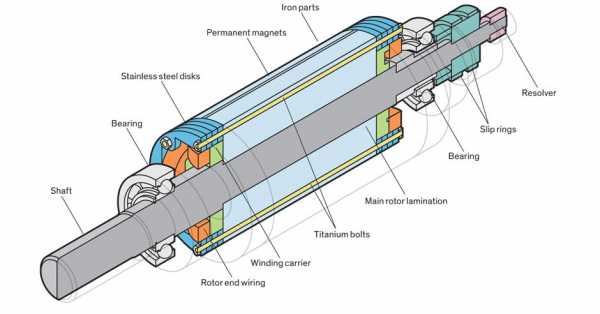
Основная проблема в разработке состояла в поиске такой конструкции ротора, которая могла бы менять форму поля, оставаясь при этом достаточно прочной для того, чтобы вращаться на высоких скоростях, не ломаясь при этом. В центре нашей схемы – многослойная структура ротора, несущего медную намотку на железном сердечнике. Мы приклеили постоянные магниты к полюсам сердечника; дополнительные шипы препятствуют их вылету. Чтобы всё удерживалось на месте, мы применили крепкие и лёгкие титановые штифты, пропущенные через электромагнитные полюса ротора, притянутые гайками к кольцам из нержавеющей стали.
Мы также нашли способ обойти недостаток первоначального мотора, уменьшение крутящего момента во время работы генератором. Теперь мы можем менять направление поля в роторе так, что генерация во время рекуперативного торможения работает так же эффективно, как режим мотора.
Этого мы добились, меняя направление тока в намотке ротора во время работы в режиме генератора. Работает это следующим образом. Представьте себе первоначальный вид ротора. Если идти по его периметру, вы обнаружите определённую последовательность северных и южных полюсов электромагнитных (Е) и постоянных магнитных (P) источников: NE, NP, SE, SP. Эта последовательность повторяется столько раз, сколько в моторе пар полюсов. Меняя направление тока в обмотке, мы меняем ориентацию электромагнитных полюсов, и только их, в результате последовательность превращается в SE, NP, NE, SP.
Изучив две этих последовательности, вы увидите, что вторая похожа на первую, идущую задом наперёд. Это значит, что ротор можно использовать в режиме мотора (первая последовательность) или в режиме генератора (вторая), когда ток в роторе меняет направление на противоположное. Таким образом наша машина работает более эффективно, чем обычные моторы, как в роли мотора, так и в роли генератора. На нашем прототипе изменение направления тока занимает не более 70 мс, что достаточно быстро для автомобилей.
В прошлом году мы построили прототип мотора на верстаке и подвергли его тщательным проверкам. Результаты ясны: при той же самой силовой электронике, параметрах статора и других ограничениях обычного мотора, машина способна выдавать почти на 6% больше крутящего момента и на 2% больше эффективности в пике. В цикле езды результаты ещё лучше: ей требуется на 4,4% меньше энергии. Это значит, что машина, проезжающая на одной зарядке 100 км, проехала бы с этим мотором 104,4 км. Дополнительные километры достаются нам почти задаром, поскольку в нашей схеме есть всего несколько дополнительных частей, заметно менее дорогих, чем дополнительные батарейки.
Мы связались с несколькими производителями оборудования, и они нашли нашу концепцию интересной, хотя пройдёт ещё много времени до того, как вы увидите один из таких асимметричных моторов в серийном автомобиле. Но появившись, в результате он станет новым стандартом, поскольку извлечение всей возможной пользы из имеющейся у вас энергии стоит в приоритете как для автопроизводителей, так и для всего нашего общества.
habr.com
Электрический двигатель — это… Что такое Электрический двигатель?
 Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравнения
Электродвигатели разной мощности (750 Вт, 25 Вт, к CD-плееру, к игрушке, к дисководу). Батарейка «Крона» дана для сравненияЭлектрический двигатель — электрическая машина (электромеханический преобразователь), в которой электрическая энергия преобразуется в механическую, побочным эффектом является выделение тепла.
Принцип действия
В основу работы любой электрической машины положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. Сейчас эти двигатели редкость, так как на рынке появились преобразователи частоты, ранее же они очень часто использовались в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая болгарка, если выкинуть электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трехфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещенный в магнитное поле, действует эдс), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов. Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора. Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трехфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надежнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно с вращающимся полем статора. Там, где нет трехфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трехфазного двигателя, пространственно смещенные на 120°, соединяются друг с другом звездой или треугольником.
Рис.1. Трехфазный двухполюсный асинхронный двигатель
На рис.1. показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трехфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f: nc=f/p
При частоте 50 Гц получаем для р = 1, 2, 3 (двух-, четырех- и шести полюсных машин) синхронные частоты вращения поля nc = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с беличьей клеткой) или ротора с контактными кольцами (фазный ротор).
В короткозамкнутом роторе обмотка состоит из металлических стержней (медь, бронза или алюминий), которые расположены в пазах и соединяются на концах закорачивающими кольцами (рис. 1). Соединение осуществляется методом пайки твердым припоем или сваркой. В случае применения алюминия или алюминиевых сплавов стержни ротора и заколачивающие кольца, включая лопасти вентилятора, расположенные на них, изготавливаются методом литья под давлением.
У ротора электродвигателя с контактными кольцами в пазах находится трехфазная обмотка, похожая на обмотку статора, включенную, например, звездой; начала фаз соединяются с тремя контактными кольцами, закрепленными на валу. При пуске двигателя и для регулировки частоты вращения можно подключить к фазам обмотки ротора реостаты (через контактные кольца и щетки). После успешного разбега контактные кольца замыкаются накоротко, так что обмотка ротора двигателя выполняет те же самые функции, что и в случае короткозамкнутого ротора.
Источник
Устройство асинхронного двигателя http://techno.x51.ru/index.php?mod=text&uitxt=905
Классификация электродвигателей
По принципу возникновения вращающего момента электродвигатели можно разделить на гистерезисные и магнитоэлектрические. У двигателей первой группы вращающий момент создается вследствие гистерезиса при перемагничивании ротора. Данные двигатели не являются традиционными и не широко распространены в промышленности.
Наиболее распространены магнитоэлектрические двигатели, которые по типу потребляемой энергии подразделяется на две большие группы — на двигатели постоянного тока и двигатели переменного тока (также существуют универсальные двигатели, которые могут питаться обоими видами тока).
Двигатели постоянного тока
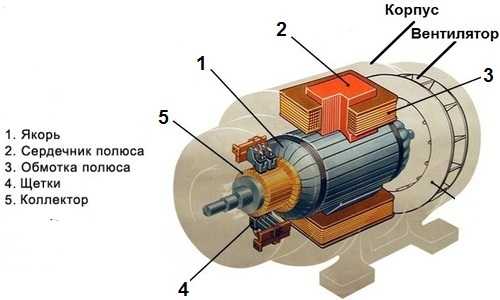
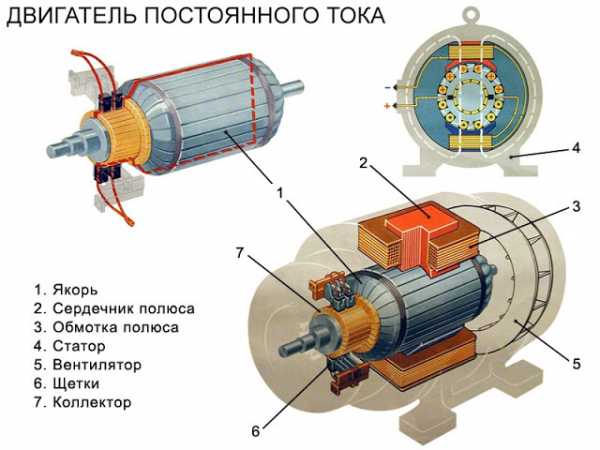
 Двигатель постоянного тока в разрезе. Справа расположен коллектор с щётками
Двигатель постоянного тока в разрезе. Справа расположен коллектор с щёткамиДвигатель постоянного тока — электрический двигатель, питание которого осуществляется постоянным током. Данная группа двигателей в свою очередь по наличию щёточно-коллекторного узла подразделяется на:
- коллекторные двигатели;
- бесколлекторные двигатели.
Щёточно-коллекторный узел обеспечивает электрическое соединение цепей вращающейся и неподвижной части машины и является наиболее ненадежным и сложным в обслуживании конструктивным элементом.[1]
По типу возбуждения коллекторные двигатели можно разделить на:
- двигатели с независимым возбуждением от электромагнитов и постоянных магнитов;
- двигатели с самовозбуждением .
Двигатели с самовозбуждением делятся на:
- Двигатели с параллельным возбуждением;(обмотка якоря включается параллельно обмотке возбуждения)
- Двигатели последовательного возбуждения;(обмотка якоря включается последовательно обмотке возбуждения)
- Двигатели смешанного возбуждения.(обмотка возбуждения включается частично последовательно частично параллельно обмотке якоря)
Бесколлекторные двигатели (вентильные двигатели) — электродвигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления (преобразователя координат) и силового полупроводникового преобразователя (инвертора). Принцип работы данных двигателей аналогичен принципу работы синхронных двигателей.[2]
Двигатели переменного тока
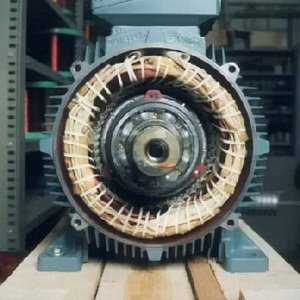
Трехфазные асинхронные двигателиДвигатель переменного тока — электрический двигатель, питание которого осуществляется переменным током. По принципу работы эти двигатели разделяются на синхронные и асинхронные двигатели. Принципиальное различие состоит в том, что в синхронных машинах первая гармоника магнитодвижущей силы статора движется со скоростью вращения ротора (благодаря чему сам ротор вращается со скоростью вращения магнитного поля в статоре), а у асинхронных — всегда есть разница между скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле вращается быстрее ротора).
Синхронный электродвигатель — электродвигатель переменного тока, ротор которого вращается синхронно с магнитным полем питающего напряжения. Данные двигатели обычно используются при больших мощностях (от сотен киловатт и выше).[2]
Существуют синхронные двигатели с дискретным угловым перемещением ротора — шаговые двигатели. У них заданное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение осуществляется путём снятия напряжения питания с одних обмоток и передачи его на другие. Ещё один вид синхронных двигателей — вентильный реактивный электродвигатель, питание обмоток которого формируется при помощи полупроводниковых элементов.
Асинхронный электродвигатель — электродвигатель переменного тока, в котором частота вращения ротора отличается от частоты вращающего магнитного поля, создаваемого питающим напряжением. Эти двигатели наиболее распространены в настоящее время.
По количеству фаз двигатели переменного тока подразделяются на:
Универсальный коллекторный электродвигатель
Универсальный коллекторный электродвигатель — коллекторный электродвигатель, который может работать и на постоянном токе и на переменном токе. Изготавливается только с последовательной обмоткой возбуждения на мощности до 200 Вт. Статор выполняется шихтованным из специальной электротехнической стали. Обмотка возбуждения включается частично при переменном токе и полностью при постоянном. Для переменного тока номинальные напряжения 127,220., для постоянного 110.220. Применяется в бытовых аппаратах, электроинструментах. Двигатели переменного тока с питанием от промышленной сети 50 гц не позволяют получить частоту вращения выше 3000 об/мин. Поэтому для получения высоких частот применяют коллекторный электродвигатель, который к тому же получается легче и меньше двигателя переменного тока той же мощности или применяют специальные передаточные механизмы, изменяющие кинематические параметры механизма до необходимых нам (мультипликаторы). При применении преобразователей частоты или наличии сети повышенной частоты (100, 200, 400 Гц) двигатели переменного тока оказываются легче и меньше коллекторных двигателей (коллекторный узел иногда занимает половину пространства). Ресурс асинхронных двигателей переменного тока гораздо выше, чем у коллекторных, и определяется состоянием подшипников и изоляции обмоток.
Синхронный двигатель с датчиком положения ротора и инвертором является электронным аналогом коллекторного двигателя постоянного тока.
История
Принцип преобразования электрической энергии в механическую энергию электромагнитным полем был продемонстрирован британским учёным Майклом Фарадеем в 1821 и состоял из свободно висящего провода, окунающегося в пул ртути. Постоянный магнит был установлен в середине пула ртути. Когда через провод пропускался ток, провод вращался вокруг магнита, показывая, что ток вызывал циклическое магнитное поле вокруг провода. Этот двигатель часто демонстрируется в школьных классах физики, вместо токсичной ртути используют рассол. Это — самый простой вид из класса электрических двигателей. Последующим усовершенствованием является Колесо Барлоу. Оно было демонстрационным устройством, непригодным в практических применениях из-за ограниченной мощности. Изобретатели стремились создать электродвигатель для производственных нужд. Они пытались заставить железный сердечник двигаться в поле электромагнита возвратно-поступательно, то есть так, как движется поршень в цилиндре паровой машины. Русский ученый Б. С. Якоби пошел иным путем. В 1834 г. он создал первый в мире практически пригодный электродвигатель с вращающимся якорем и опубликовал теоретическую работу «О применении электромагнетизма для приведения в движение машины». Б. С. Якоби писал, что его двигатель несложен и «дает непосредственно круговое движение, которого гораздо легче преобразовать в другие виды движения, чем возвратно-поступательное».
Вращательное движение якоря в двигателе Якоби происходило вследствие попеременного притяжения и отталкивания электромагнитов. Неподвижная группа U-образных электромагнитов питалась током непосредственно от гальванической батареи, причем направление тока в этих электромагнитах оставалось неизменным. Подвижная группа электромагнитов была подключена к батарее через коммутатор, с помощью которого направление тока в каждом электромагните изменялось раз за один оборот диска. Полярность электромагнитов при этом соответственно изменялась, а каждый из подвижных электромагнитов попеременного притягивался и отталкивался соответствующим неподвижным электромагнитом: вал двигателя начинал вращаться. Мощность такого двигателя составляла всего 15 Вт. Впоследствии Якоби довел мощность электродвигателя до 550 Вт. Этот двигатель был установлен сначала на лодке, а позже на железнодорожной платформе.
13 сентября 1838 г. лодка с 12 пассажирами поплыла по Неве против течения со скоростью около 3 км/ч. Лодка была снабжена колесами с лопастями. Колеса приводились во вращение электрическим двигателем, который получал ток от батареи из 320 гальванических элементов. Так впервые электрический двигатель появился на судне.
Примечания
Литература
- Белов М. П., Новиков В. А., Рассудов Л. Н. Автоматизированный электропривод типовых производственных механизмов и технологических комплексов. — 3-е изд., испр. — М.: Издательский центр «Академия», 2007. — 575 с. — (Высшие профессиональное образование). — 1000 экз. — ISBN 978-5-7695-4497-2
Ссылки
biograf.academic.ru
Устройство и принцип работы электродвигателя
Электродвигатель – это электротехническое устройство для преобразования электрической энергии в механическую. Сегодня повсеместно применяются электромоторы в промышленности для привода различных станков и механизмов. В домашнем хозяйстве они установлены в стиральной машине, холодильнике, соковыжималке, кухонном комбайне, вентиляторах, электробритвах и т. п. Электродвигатели приводят в движение, подключенные к ней устройства и механизмы.
В этой статье Я расскажу о самых распространенных видах и принципах работы электрических двигателей переменного тока, широко используемых в гараже, в домашнем хозяйстве или мастерской.
Содержание статьи
Как работает электродвигатель
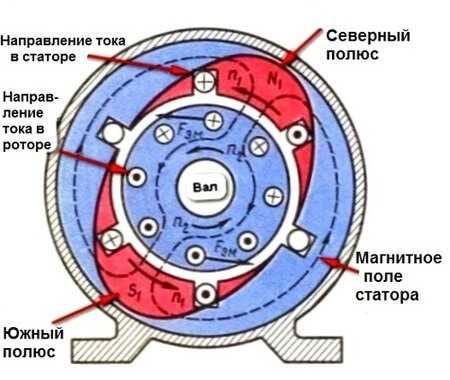
Двигатель работает на основе эффекта, обнаруженного Майклом Фарадеем еще в 1821 году. Он сделал открытие, что при взаимодействии электрического тока в проводнике и магнита может возникнуть непрерывное вращение.
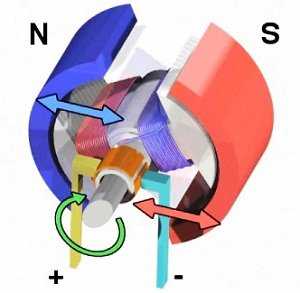
Если в однородном магнитном поле расположить в вертикальном положении рамку и пропустить по ней ток, тогда вокруг проводника возникнет электромагнитное поле, которое будет взаимодействовать с полюсами магнитов. От одного рамка будет отталкиваться, а к другому притягиваться.
В результате рамка повернется в горизонтальное положения, в котором будет нулевым воздействие магнитного поля на проводник. Для того что бы вращение продолжилось необходимо добавить еще одну рамку под углом или изменить направление тока в рамке в подходящий момент.
На рисунке это делается при помощи двух полуколец, к которым примыкают контактные пластины от батарейки. В результате после совершения полуоборота меняется полярность и вращение продолжается.
В современных электродвигателях вместо постоянных магнитов для создания магнитного поля используются катушки индуктивности или электромагниты. Если разобрать любой мотор, то Вы увидите намотанные витки проволоки, покрытой изоляционным лаком. Эти витки и есть электромагнит или как их еще называют обмотка возбуждения.
В быту же постоянные магниты используются в детских игрушках на батарейках.
В других же более мощных двигателях используются только электромагниты или обмотки. Вращающаяся часть с ними называется ротор, а неподвижная- статор.
Виды электродвигателей
Сегодня существуют довольно много электродвигателей разных конструкций и типов. Их можно разделить по типу электропитания:
- Переменного тока, работающие напрямую от электросети.
- Постоянного тока, которые работают от батареек, АКБ, блоков питания или других источников постоянного тока.
По принципу работы:
- Синхронные, в которых есть обмотки на роторе и щеточный механизм для подачи на них электрического тока.
- Асинхронные, самый простой и распространенный вид мотора. В них нет щеток и обмоток на роторе.
Синхронный мотор вращается синхронно с магнитным полем, которое его вращает, а у асинхронного ротор вращается медленнее вращающегося магнитного поля в статоре .
Принцип работы и устройство асинхронного электродвигателя
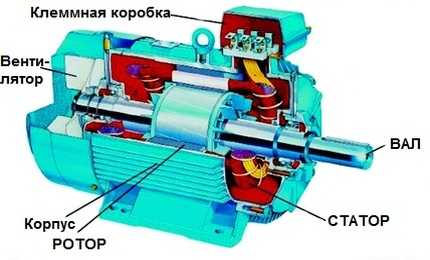
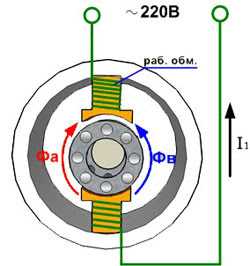
В корпусе асинхронного двигателя укладываются обмотки статора (для 380 Вольт их будет 3), которые создают вращающееся магнитное поле. Концы их для подключения выводятся на специальную клеммную колодку. Охлаждаются обмотки, благодаря вентилятору, установленному на вале в торце электродвигателя.
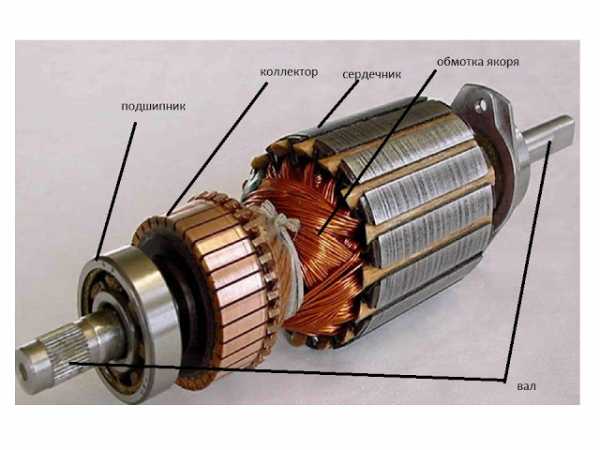
Ротор, являющиеся одним целым с валом, изготавливается из металлических стержней, которые замыкаются между собой с обоих сторон, поэтому он и называется короткозамкнутым.
Благодаря такой конструкции отпадает необходимость в частом периодическом обслуживании и замене токоподающих щеток, многократно увеличивается надежность, долговечность и безотказность.
Как правило, основной причиной поломки асинхронного мотора является износ подшипников, в которых вращается вал.
Принцип работы. Для того что бы работал асинхронный двигатель необходимо, что бы ротор вращался медленнее электромагнитного поля статора, в результате чего наводится ЭДС (возникает электроток) в роторе. Здесь важное условие, если бы ротор вращался с такой же скоростью как и магнитное поле, то в нем по закону электромагнитной индукции не наводилось бы ЭДС и, следовательно не было бы вращения. Но в реальности, из-за трения подшипников или нагрузки на вал, ротор всегда будет вращаться медленнее.
Магнитные полюса постоянно вращаются в обмотках мотора, и постоянно меняется направление тока в роторе. В один момент времени, например направление токов в обмотках статора и ротора изображено схематично в виде крестиков (ток течет от нас) и точек (ток на нас). Вращающееся магнитное поле изображено изображено пунктиром.
Например, как работает циркулярная пила. Наибольшие обороты у нее без нагрузки. Но как только мы начинаем резать доску, скорость вращения уменьшается и одновременно с этим ротор начинает медленнее вращаться относительно электромагнитного поля и в нем по законам электротехники начинает наводится еще большей величины ЭДС. Вырастает потребляемый ток мотором и он начинает работать на полной мощности. Если же нагрузка на вал будет столь велика, что его застопорит, то может возникнуть повреждение короткозамкнутого ротора из-за максимальной величины наводимой в нем ЭДС. Вот почему важно подбирать двигатель, подходящей мощности. Если же взять большей, то неоправданными будут энергозатраты.
Скорость вращения ротора зависит от количества полюсов. При 2 полюсах скорость вращения будет равна скорости вращения магнитного поля, равного максимум 3000 оборотов в секунду при частоте сети 50 Гц. Что бы понизить скорость вдвое, необходимо увеличить количество полюсов в статоре до четырех.
Весомым недостатком асинхронных двигателей является то, что они подаются регулировке скорости вращения вала только при помощи изменения частоты электрического тока. А так не возможно добиться постоянной частоты вращения вала.
Принцип работы и устройство синхронного электродвигателя переменного тока
Данный вид электродвигателя используется в быту там, где необходима постоянная скорость вращения, возможность ее регулировки, а так же если необходима скорость вращения более 3000 оборотов в минуту (это максимум для асинхронных).
Синхронные моторы устанавливаются в электроинструменте, пылесосе, стиральной машине и т. д.
В корпусе синхронного двигателя переменного тока расположены обмотки (3 на рисунке), которые также намотаны и на ротор или якорь (1). Их выводы припаяны к секторам токосъемного кольца или коллектора (5), на которые при помощи графитовых щеток (4) подается напряжение. При чем выводы расположены так, что щетки всегда подают напряжение только на одну пару.
Наиболее частыми поломками коллекторных двигателей является:
- Износ щетокили их плохой их контакт из-за ослабления прижимной пружины.
- Загрязнение коллектора.Чистите либо спиртом или нулевой наждачной бумагой.
- Износ подшипников.
Принцип работы. Вращающий момент в электромоторе создается в результате взаимодействия между током тока якоря и магнитным потоком в обмотке возбуждения. С изменением направления переменного тока будет меняться и направление магнитного потока одновременно в корпусе и якоре, благодаря чему вращение всегда будет в одну сторону.
Регулировка скорости вращения меняется методом изменения величины подаваемого напряжения. В дрелях и пылесосах для этого используется реостат или переменное сопротивление.
Изменение направления вращения происходит также как и у двигателей постоянного тока, о которых Я расскажу в следующей статье.
Самое главное о синхронных двигателях Я постарался изложить, более подробно Вы можете прочитать на них на Википедии.
Понравилась статья? Поделиться с друзьями:
elektro-enot.ru
Какие бывают двигатели? Типы электродвигателей. Асинхронные двигатели

В основу работы любых электродвигателей положен принцип электромагнитной индукции. Электродвигатель состоит из неподвижной части — статора (для асинхронных и синхронных движков переменного тока) либо индуктора (для движков постоянного тока) и подвижной части — ротора (для асинхронных и синхронных движков переменного тока) либо якоря (для движков постоянного тока). В роли индуктора на маломощных двигателях постоянного тока нередко используются постоянные магниты.
Все двигатели, грубо говоря можно поделить на два вида:
двигатели постоянного тока
двигатели переменного тока (асинхронные и синхронные)
Двигатели постоянного тока
По неким мнениям данный двигатель возможно еще назвать синхронной машиной постоянного тока с самосинхронизацией. Простой движок, являющийся машиной постоянного тока, состоит из постоянного магнита на индукторе (статоре), 1-го электромагнита с очевидно выраженными полюсами на якоре (двухзубцового якоря с явно выраженными полюсами и с одной обмоткой), щёточноколлекторного узла с 2-мя пластинами (ламелями) и 2-мя щётками.Простой двигатель имеет 2 положения ротора (2 «мёртвые точки»), из которых неосуществим самозапуск, и неравномерный крутящий момент. В первом приближении магнитное поле полюсов статора равномерное (однородное).
Данные двигатели с наличием щёточно-коллекторного узла бывают:
Колекторные — электрическое устройство, в котором датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство — щёточно-коллекторный узел.
Бесколекторные — замкнутая электромеханическая система, состоящая из синхронного устройства с синусоидальным распределением магнитного поля в зазоре, датчика положения ротора, преобразователя координат и усилителя мощности. Более дорогой вариант в сравнение с колекторными двигателями.
Двигатели переменного тока
По типу работы данные двигатели делятся на синхронные и асинхронные двигатели. Принципное отличие заключается в том, что в синхронных машинах 1-ая гармоника магнитодвижущей силы статора перемещается со скоростью вращения ротора (по этому сам ротор крутится со скоростью вращения магнитного поля в статоре), а у асинхронных — есть и остается разница меж скоростью вращения ротора и скоростью вращения магнитного поля в статоре (поле крутится быстрее ротора).Синхронный — двигатель переменного тока, ротор которого крутится синхронно с магнитным полем питающего напряжения. Эти движки традиционно применяются при огромных мощностях (от сотен киловатт и выше).
Есть синхронные двигатели с дискретным угловым движением ротора — шаговые двигатели. У них данное положение ротора фиксируется подачей питания на соответствующие обмотки. Переход в другое положение исполняется путём снятия напряжения питания с одних обмоток и передачи его на другие обмотки двигателя.
Ещё один вид синхронных движков — вентильный реактивный эл-двигатель, питание обмоток которого складывается с помощью полупроводниковых элементов.

Асинхронный — двигатель переменного тока, в котором частота вращения ротора различается от частоты крутящего магнитного поля, творимого питающим напряжением, второе название асинхронных машин — индукционные обосновано тем, что ток в обмотке ротора индуцируется вертящимся полем статора. Асинхронные машины сейчас оформляют огромную часть электрических машин. В главном они используются в виде электродвигателей и считаются ключевыми преобразователями электрической энергии в механическую, причём в основном используются асинхронные движки с короткозамкнутым ротором
По количеству фаз двигатели бывают:
- однофазные
- двухфазные
- трехфазные
Самые популярные и шыроковостребованые двигатели которые применяются в производстве и бытовом хозяйстве:
Однофазный асинхронный двигатель с короткозамкнутым ротором
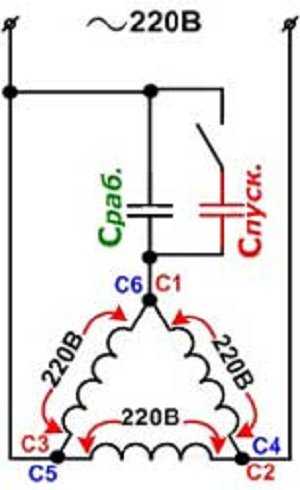
Однофазовый асинхронный движок имеет на статоре только 1 рабочую обмотку, на которую в ходе работы мотора подается переменный ток. Хотя для запуска мотора на его статоре есть и вспомогательная обмотка, которая краткосрочно подключается к сети через конденсатор либо индуктивность, или замыкается накоротко пусковыми контактами рубильника. Это нужно для создания исходного сдвига фаз, чтоб ротор начал крутиться, по другому пульсирующее магнитное поле статора не здвинуло б ротор с места.

Ротор такового мотора, как и любого иного асинхронного мотора с короткозамкнутым ротором, являет из себя цилиндрический сердечник с залитыми алюминием пазами, с сразу отлитыми вентиляционными лопастями.
Таковой ротор именуется короткозамкнутым ротором. Однофазовые движки используются в маломощных устройствах, в том числе комнатные вентиляторы либо маленькие насосы.
Двухфазный асинхронный двигатель с короткозамкнутым ротором
Двухфазные асинхронные движки более эффективны при работе от однофазовой сети переменного тока. Они содержат на статоре две рабочие обмотки, находящиеся перпендикулярно, при этом одна из обмоток подключается к сети переменного тока напрямую, а вторая – через фазосдвигающий конденсатор, так выходит крутящееся магнитное поле, а вот без конденсатора ротор бы не двинулся с места.

Данные двигатели помимо прочего имеют короткозамкнутый ротор, а их использование еще обширнее, нежели у однофазовых. Тут уже и стиральные машинки, и разные станки. Двухфазные движки для питания от однофазовых сетей называют конденсаторными двигателями, потому что фазосдвигающий конденсатор считается часто обязательной их частью.
Трехфазный асинхронный двигатель с короткозамкнутым ротором
Трехфазный асинхронный двигатель имеет на статоре три рабочие обмотки, сдвинутые сравнительно друг друга так, что при подключении в трехфазную сеть, их магнитные поля получаются смещенными в пространстве сравнительно друг дружку на 120 градусов. При включении трехфазного мотора к трехфазной сети переменного тока, появляется крутящееся магнитное поле, приводящее в перемещение короткозамкнутый ротор.

Обмотки статора трехфазного мотора возможно соединить по схеме «звезда» либо «треугольник», при этом для питания мотора по схеме «звезда» потребуется напряжение выше, чем для схемы «треугольник», и на движке, потому, указываются 2 напряжения, к примеру: 127/220 либо 220/380. Трехфазные движки незаменимы для приведения в действие разных станков, лебедок, циркулярных пил, подъемных кранов, и т.п.
Трехфазный асинхронный двигатель с фазным ротором
Трехфазный асинхронный движок с фазным ротором имеет статор подобный описанным выше типам движков, шихтованный магнитопровод с 3-мя уложенными в его пазы обмотками, но в фазный ротор не залиты дюралевые стержни, а уложена уже настоящая трехфазная обмотка, в соединении «звезда». Концы звезды обмотки фазного ротора выведены на три контактных кольца, насаженных на вал ротора, и электрически отделенных от него.

Посредством щеток, на кольца помимо прочего подается трехфазное переменное напряжение, и включение может быть осуществлено как впрямую, так и через реостаты. Непременно, движки с фазным ротором стоят подороже, хотя их пусковой момент под нагрузкой значительно повыше, нежели у типов движков с короткозамкнутым ротором. Именно в следствие завышенной силы и огромного пускового момента, данный вид движков отыскал использование в приводах лифтов и подъемных кранов, другими словами там, где прибор запускается под нагрузкой а не в холостую, как у двигателей с короткозамкнутым ротором.
elektt.blogspot.com
Принцип работы электродвигателя — устройство и отличия разных видов
Электродвигатели – это устройства, в которых электрическая энергия превращается в механическую. В основе принципа их действия лежит явление электромагнитной индукции.
Однако способы взаимодействия магнитных полей, заставляющих вращаться ротор двигателя, существенно различаются в зависимости от типа питающего напряжения – переменного или постоянного.
Устройство и принцип действия электродвигателя постоянного тока
В основе принципа работы электродвигателя постоянного тока лежит эффект отталкивания одноименных полюсов постоянных магнитов и притягивания разноименных. Приоритет ее изобретения принадлежит русскому инженеру Б. С. Якоби. Первая промышленная модель двигателя постоянного тока была создана в 1838 году. С тех пор его конструкция не претерпела кардинальных изменений.
В двигателях постоянного тока небольшой мощности один из магнитов является физически существующим. Он закреплен непосредственно на корпусе машины. Второй создается в обмотке якоря после подключения к ней источника постоянного тока. Для этого используется специальное устройство – коллекторно-щеточный узел. Сам коллектор – это токопроводящее кольцо, закрепленное на валу двигателя. К нему подключены концы обмотки якоря.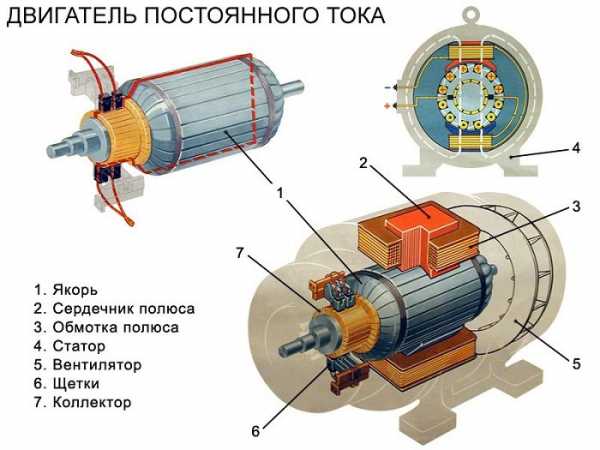
Чтобы возник вращающий момент, необходимо непрерывно менять местами полюса постоянного магнита якоря. Происходить это должно в момент пересечения полюсом так называемой магнитной нейтрали. Конструктивно такая задача решается разделением кольца коллектора на секторы, разделенные диэлектрическими пластинами. Концы обмоток якоря присоединяются к ним поочередно.
В двигателях большой мощности физически существующих магнитов не используют из-за их большого веса. Для создания постоянного магнитного поля статора используется несколько металлических стержней, каждый из которых имеет собственную обмотку из проводника, подключенного к плюсовой или минусовой питающей шине. Одноименные полюса включаются последовательно друг другу.
Количество пар полюсов на корпусе двигателя может быть равно одной или четырем. Число токосъемных щеток на коллекторе якоря должно ему соответствовать.
 Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Электродвигатели большой мощности имеют ряд конструктивных хитростей. Например, после запуска двигателя и с изменением нагрузки на него, узел токосъемных щеток сдвигается на определенный угол против вращения вала. Так компенсируется эффект «реакции якоря», ведущий к торможению вала и снижению эффективности электрической машины.
Также существует три схемы подключения двигателя постоянного тока:
- с параллельным возбуждением;
- последовательным;
- смешанным.
Параллельное возбуждение – это когда параллельно обмотке якоря включается еще одна независимая, обычно регулируемая (реостат). Такой способ подключения позволяет очень плавно регулировать скорость вращения и достигать ее максимальной стабильности. Его используют для питания электродвигателей станков и кранового оборудования.
Последовательная – в цепь питания якоря дополнительная обмотка включена последовательно. Такой тип подключения используется для того, чтобы в нужный момент резко нарастить вращающее усилие двигателя. Например, при трогании с места железнодорожных составов.
Двигатели постоянного тока имеют возможность плавной регулировки частоты вращения, поэтому их применяют в качестве тяговых на электротранспорте и грузоподъемном оборудовании.
Двигатели переменного тока — в чем отличие?
 Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
Устройство и принцип работы электродвигателя переменного тока для создания крутящего момента предусматривают использование вращающегося магнитного поля. Их изобретателем считается русский инженер М. О. Доливо-Добровольский, создавший в 1890 году первый промышленный образец двигателя и являющийся основоположником теории и техники трехфазного переменного тока.
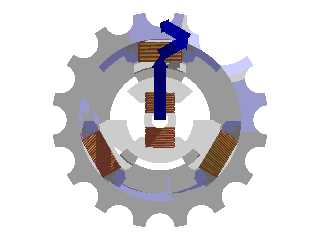
Вращающееся магнитное поле возникает в трех обмотках статора двигателя сразу, как только они подключаются к цепи питающего напряжения. Ротор такого электромотора в традиционном исполнении не имеет никаких обмоток и представляет собой, грубо говоря, кусок железа, чем-то напоминающий беличье колесо.
Магнитное поле статора провоцирует возникновение в роторе тока, причем очень большого, ведь это короткозамкнутая конструкция. Этот ток вызывает возникновение собственного поля якоря, которое «сцепляется» с вихревым магнитным потом статора и заставляет вращаться вал двигателя в том же направлении.
Магнитное поле якоря имеет ту же скорость, что и статора, но отстает от него по фазе примерно на 8–100. Именно поэтому двигатели переменного тока называются асинхронными.Принцип действия электродвигателя переменного тока с традиционным, короткозамкнутым ротором, имеет очень большие пусковые токи. Вероятно, многие из вас это замечали – при пуске двигателей лампы накаливания меняют яркость свечения. Поэтому в электрических машинах большой мощности применяется фазный ротор – на нем уложены три обмотки, соединенные «звездой».
Обмотки якоря не подключены к питающей сети, а посредством коллекторно-щеточного узла соединены с пусковым реостатом. Процесс включения такого двигателя состоит из соединения с питающей сетью и постепенного уменьшения до нуля активного сопротивления в цепи якоря. Электромотор включается плавно и без перегрузок.
Особенности использования асинхронных двигателей в однофазной цепи
 Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Несмотря на то, что вращающееся магнитное поле статора проще всего получить от трехфазного напряжения, принцип действия асинхронного электродвигателя позволяет ему работать и от однофазной, бытовой сети, если в их конструкцию будут внесены некоторые изменения.
Для этого на статоре должно быть две обмотки, одна из которой является «пусковой». Ток в ней сдвигается по фазе на 90° за счет включения в цепь реактивной нагрузки. Чаще всего для этого используется конденсатор.
Запитать от бытовой розетки можно и промышленный трехфазный двигатель. Для этого в его клеммной коробке две обмотки соединяются в одну, и в эту цепь включается конденсатор. Исходя из принципа работы асинхронных электродвигателей, запитанных от однофазной цепи, следует указать, что они имеют меньший КПД и очень чувствительны к перегрузкам.
Электродвигатели этого типа легко запускаются, но частоту их вращения практически невозможно регулировать.Они чувствительны к перепадам напряжения, а при «недогрузе» снижают коэффициент полезного действия, становясь источником непропорционально больших затрат электроэнергии. При этом существуют методы использования асинхронного двигателя как генератор.
Универсальные коллекторные двигатели — принцип работы и характеристики
 В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В бытовых электроинструментах малой мощности, от которых требуются малые пусковые токи, большой вращающий момент, высокая частота вращения и возможность ее плавной регулировки, используются так называемые универсальные коллекторные двигатели. По своей конструкции они аналогичны двигателям постоянного тока с последовательным возбуждением.
В таких двигателях магнитное поле статора создается за счет питающего напряжения. Только немного изменена конструкция магнитопроводов – она не литая, а наборная, что позволяет уменьшать перемагничивание и нагрев токами Фуко. Последовательно включенная в цепь якоря индуктивность дает возможность менять направление магнитного поля статора и якоря в одном направлении и в той же фазе.
Практически полная синхронность магнитных полей позволяет двигателю набирать обороты даже при значительных нагрузках на валу, что и требуется для работы дрелей, перфораторов, пылесосов, «болгарок» или полотерных машин.
Если в питающую цепь такого двигателя включен регулируемый трансформатор, то частоту его вращения можно плавно менять. А вот направление, при питании от цепи переменного тока, изменить не удастся никогда.
Такие электромоторы способны развивать очень высокие обороты, компактны и имеют больший вращающий момент. Однако наличие коллекторно-щеточного узла снижает их моторесурс – графитовые щетки достаточно быстро истираются на высоких оборотах, особенно если коллектор имеет механические повреждения.Электродвигатели имеют самый большой КПД (более 80 %) из всех устройств, созданных человеком. Их изобретение в конце XIX века вполне можно считать качественным цивилизационным скачком, ведь без них невозможно представить жизнь современного общества, основанного на высоких технологиях, а чего-либо более эффективного пока еще не придумано.
Синхронный принцип работы электродвигателя на видео
elektrik24.net
Электрический двигатель
- Статья опубликована 26.06.2014 06:06
- Последняя правка произведена 27.01.2016 18:29
Определение.
Электрический двигатель – механизм или специальная машина, предназначенная для преобразования электрической энергии в механическую, при котором так же выделяется тепло.
Предыстория.
Якоби Борис СеменовичУже в 1821 году, знаменитый британский ученый Майкл Фарадей продемонстрировал принцип преобразования электромагнитным полем электрической энергии в механическую энергию. Установка состояли из подвешенного провода, которых окунался в ртуть. Магнит устанавливался посередине колбы с ртутью. При замыкании цепи, провод начинал вращение вокруг магнита, демонстрируя то, что вокруг провода, эл. током, образовывалось электрическое поле.
Эту модель двигателя часто демонстрировали в школах и университетах. Данный двигатель считается самым простым видом из всего класса электродвигателей. Впоследствии он получил продолжение в виде Колеса Барлова. Однако новое устройство носило лишь демонстрационный характер, поскольку вырабатываемые им мощности были слишком малы.
Ученые и изобретатели работали над двигателем с целью использования его в производственных нуждах. Все они стремились к тому, чтобы сердечник двигателя двигался в магнитном поле вращательно-поступательно, на манер поршня в цилиндре паровой машины. Русский изобретатель Б.С. Якоби сделал все гораздо проще. Принцип работы его двигателя заключался в попеременном притяжении и отталкивании электромагнитов. Часть электромагнитов были запитаны от гальванической батареи, и направление течения тока в них не менялась, а другая часть подключалась к батарее через коммутатор, благодаря которому изменялось направление течения тока через каждый оборот. Полярность электромагнитов менялась, и каждый из подвижных электромагнитов то притягивался, то отталкивался от соответствующего ему неподвижного электромагнита. Вал приходил в движение.
электродвигатель Бориса Якоби Изначально мощность двигателя была небольшой и составляла всего 15 Вт, после доработок, Якоби удалось довести мощность до 550 Вт.. 13 сентября 1838 году, лодка, оборудованная этим двигателем, плыла с 12 пассажирами по Неве, против течения, развивая при этом скорость в 3 км/ч. Двигатель был запитан от большой батареи, состоящей из 320 гальванических элементов. Мощность современных электрических двигателей превышает 55 кВт. По вопросом прибретения электрических двигателей смотрите здесь.
Принцип действия.
В основу работы электрической машины заложено явление электромагнитной индукции (ЭМИ). Явление ЭМИ заключается в том, что при любом изменении магнитного потока, пронизывающего замкнутый контур, в нем (контуре) образуется индукционный ток.
Сам двигатель состоит из ротора (подвижной части – магнита или катушки) и статора (неподвижной части – катушки). Чаще всего конструкция двигателя представляет собой две катушки. Статор обложен обмоткой, по которой, собственно, и течет ток. Ток порождает магнитное поле, которое воздействует на другую катушку. В ней, по причине ЭМИ, так же образуется ток, который порождает магнитное поле, действующее на первую катушку. И так все повторяется по замкнутому циклу. В итоге, взаимодействие полей ротора и статора создает вращающий момент, приводящий в движение ротор двигателя. Таким образом, происходит трансформация электрической энергии в механическую, которую можно использовать в различных приборах, механизмах и даже в автомобилях.
Вращающееся магнитное поле
Вращение электромотора
Классификация электрических двигателей.
По способу питания:
• двигатели постоянного тока – запитываются от источников постоянного тока.
• двигатели переменного тока — запитываются от источников переменного тока.
• универсальные двигатели – запитываются как от постоянного, так и переменного тока.
По конструкции:
Коллекторный электродвигатель — электродвигатель, в котором в качестве датчика положения ротора и переключателя тока используется щеточноколлекторный узел.
Бесколлекторый электродвигатель – электродвигатель, состоящий из замкнутой системы, в которой используются: системы управления (преобразователь координат), силовой полупроводниковый преобразователь (инвертор), датчик положения ротора (ДПР).
• С приведением в действие постоянными магнитами;
• С параллельным соединением якоря и обмоток возбуждения;
• С последовательным соединением якоря и обмоток возбуждения;
• Со смешанным соединением якоря и обмоток возбуждения;
По количеству фаз:
• Однофазные – запускаются вручную, либо же имеют пусковую обмотка или фазосдвигающую цепь.
• Двухфазные
• Трехфазные
• Многофазные
По синхронизации:
• Синхронный электродвигатель – электрический двигатель переменного тока с синхронным движением магнитного поля питающего напряжения и ротора.
• Асинхронный электродвигатель – электрический двигатель переменного тока с отличающейся частотой движения ротора и магнитного поля, порождаемого питающим напряжением.
autohis.ru