
Какой электродвигатель лучше выбрать?
При выборе бесщеточного электродвигателя для своих разработок инженеры имеют несколько вариантов. Неправильный выбор может привести к провалу проекта не только на этапе разработки – испытания, но и после выхода на рынок, что крайне не желательно. Для облегчения работы инженеров мы сделаем краткое описание преимуществ и недостатков четырех наиболее популярных видов бесщеточных электрических машин: асинхронный электродвигатель (АД), двигатель с постоянными магнитами (ПМ), синхронные реактивные электродвигатели (СРД), вентильные реактивные электродвигатели (ВРД).
Содержание:
Асинхронные электродвигатели
Асинхронные электрические машины смело можно назвать костяком современной промышленности. Благодаря своей простоте, относительно низкой стоимости, минимальным затратам на обслуживание, а также возможности работать напрямую от промышленных сетей переменного тока, они прочно въелись в современные производственные процессы.

Сегодня существует множество различных преобразователей частоты с самыми различными алгоритмами управления, которые позволяют регулировать скорость и момент асинхронной машины в большом диапазоне с хорошей точностью. Все эти свойства позволили асинхронной машине значительно потеснить с рынка традиционные коллекторные двигатели. Вот почему регулируемые асинхронные электродвигатели (АД) легко встретить в самых различных устройствах и механизмах, таких как тяговый асинхронный электропривод, электроприводы стиральных машин, вентиляторов, компрессоров, воздуходувок, кранов, лифтов и многом другом электрооборудовании.
АД создает вращающий момент за счет взаимодействия тока статора с индуцированным током ротора. Но токи ротора нагревают его, что приводит к нагреванию подшипников и снижению их срока службы. Замена традиционной алюминиевой обмотки на медную не устраняет проблему, а приводит к удорожанию электрической машины и может накладывать ограничения на прямой ее пуск.
Статор асинхронной машины имеет довольно большую постоянную времени, что негативно сказывается на реагировании системы управления при изменении скорости или нагрузки. К сожалению, потери связанные с намагничиванием не зависят от нагрузки машины, что снижает КПД АД при работе с малыми нагрузками. Автоматическое уменьшение потока статора возможно использовать для решения данной проблемы — для этого необходим быстрый отклик системы управления на изменения нагрузки, но как показывает практика, такая коррекция не существенно увеличивает КПД.
На скоростях превышающих номинальную поле статора ослабевает из-за ограниченного напряжения питания. Вращающий момент начинает падать, так как для его поддержания будет требоваться больший ток ротора. Следовательно, управляемые АД ограничиваются диапазоном скорости для поддержания постоянной мощности примерно 2:1.
Механизмы, которые требуют более широкого диапазона регулирования, такие как: станки с ЧПУ, тяговый электропривод, могут снабжаться асинхронными электродвигателями специального исполнения, где для увеличения диапазона регулирования могут уменьшать количество витков обмотки, снижая при этом значения крутящего момента на низких скоростях. Также возможен вариант с использованием более высоких токов статора, что требует установки более дорогих и менее эффективных инверторов.
Немаловажным фактором при работе АД является качество питающего напряжения, ведь максимальный КПД электродвигатель имеет при синусоидальной форме питающего напряжения. В реальности преобразователь частоты обеспечивает импульсное напряжение и ток, похожий на синусоидальный. Проектировщикам стоит иметь ввиду, что КПД системы ПЧ-АД будет меньше, чем сумма КПД преобразователя и двигателя в отдельности. Улучшения качества выходного тока и напряжения повышают увеличением несущей частоты преобразователя, это приводит к снижению потерь в двигателе, но при этом возрастают потери в самом инверторе. Одним из популярных решений, особенно для промышленных мощных электроприводов, является установка фильтров между преобразователем частоты и асинхронной машиной. Однако это приводит к увеличению стоимости, габаритов установки, а также к дополнительным потерям мощности.
Еще одним недостатком асинхронных машин переменного тока является то, что их обмотки распределены на протяжении многих пазов в сердечнике статора. Это приводит к появлению длинных концевых поворотов, которые увеличивают габариты и потери энергии в машине. Эти вопросы исключены в стандартах IE4 или классах IE4. В настоящее время европейский стандарт (IEC60034) специально исключает любые двигатели, требующие электронного управления.
Двигатели с постоянными магнитами
Двигатели с постоянными магнитами (английский PMMS) создают крутящий момент благодаря взаимодействию токов статора с постоянными магнитами внутри или снаружи ротора. Электродвигатели с поверхностным расположением магнитов являются маломощными и используются в IT оборудовании, офисной технике, автомобильном транспорте. Электродвигатели со встроенными магнитами (IPM) распространены в мощных машинах, используемых в промышленности.
Двигатели с постоянными магнитами (ПМ) могут использовать концентрированные (с коротким шагом) обмотки, если пульсации вращающего момента не являются критичными, но распределенные обмотки являются нормой в ПМ.
Поскольку PMMS не имеют механических коммутаторов, то преобразователи играют важную роль в процессе контроля тока обмотки.
В отличии от других видов бесщеточных электродвигателей, PMMS не требуют тока возбуждения, необходимого для поддерживания магнитного потока ротора. Следовательно, они способны обеспечить максимальный крутящий момент на единицу объема и могут быть лучшим выбором, если требования к массо-габаритным показателям выходят на первый план.

К наибольшим недостаткам таких машин можно отнести их очень высокую стоимость. Высокопроизводительные электрические машины с постоянными магнитами используют такие материалы как неодим и диспрозий. Данные материалы относятся к редкоземельным и добываются в геополитически нестабильных странах, что приводит к высоким и нестабильным ценам.
Также постоянные магниты добавляют производительности при работе на низких скоростях, но являются «Ахиллесовой пятой» при работе на высоких. Например, при увеличении скорости машины с постоянными магнитами возрастет и ее ЭДС, постепенно приближаясь к напряжению питания инвертора, при этом снизить поток машины не представляется возможным. Как правило, номинальная скорость является максимальной для ПМ с поверхностно-магнитной конструкцией при номинальном напряжении питания.
На скоростях больше номинальной, для электродвигателей с постоянными магнитами типа IPM, используют подавление активного поля, что достигается путем манипуляций с током статора при помощи преобразователя. Диапазон скорости, в котором двигатель может надежно работать, ограничен примерно 4:1.
Необходимость ослабления поля в зависимости от скорости приводит к потерям независящим от вращающего момента. Это снижает КПД на высоких скоростях, и особенно при малых нагрузках. Этот эффект наиболее актуален при использовании ПМ в качестве тягового автомобильного электропривода, где высокая скорость на автостраде неизбежно влечет за собой необходимость ослабления магнитного поля. Часто разработчики выступают за применение двигателей с постоянными магнитами в качестве тяговых электроприводов электромобилей, однако их эффективность при работе в данной системе довольно сомнительна, особенно после вычислений связанных с реальными циклами вождения. Некоторые производители электромобилей сделали переход от ПМ к асинхронным электродвигателям в качестве тяговых.
Также к существенным недостаткам электродвигателей с постоянными магнитами можно отнести их трудно управляемость в условиях неисправности из-за присущей им противо-ЭДС. Ток будет протекать в обмотках, даже при выключенном преобразователе, пока вращается машина. Это может приводить к перегреву и другим неприятным последствиям. Потеря контроля над ослабленным магнитным полем, например при аварийном отключении источника питания, может привести к неподконтрольной генерации электрической энергии и, как следствие, к опасному возрастанию напряжения.
Рабочие температуры – это еще одна не самая сильная сторона ПМ, кроме машин, изготовленных из самарий-кобальта. Также большие броски тока инвертора могут привести к размагничиванию.
Максимальная скорость PMMS ограничивается механической прочностью крепления магнитов. В случае повреждения ПМ его ремонт, как правило, осуществляется на заводе изготовителе, так как извлечение и безопасная обработка ротора практически невозможна в обычных условиях. И, наконец, утилизация. Да это тоже доставляет немного хлопот после окончания срока службы машины, но наличие редкоземельных материалов в этой машине должно упростить этот процесс в ближайшем будущем.
Несмотря на перечисленные выше недостатки, электродвигатели с постоянными магнитами являются непревзойденными с точки зрения низкоскоростных мелкогабаритных механизмов и устройств.
Реактивные синхронные двигатели
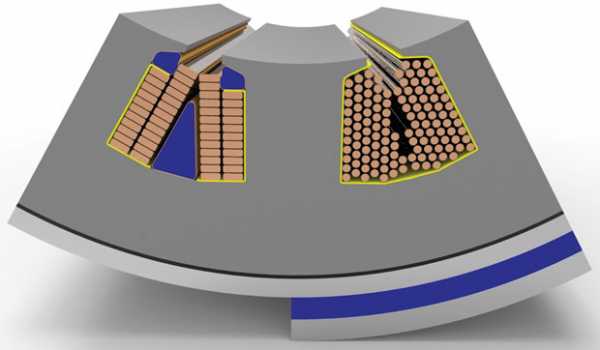
Синхронные реактивные электродвигатели всегда работают только в паре с преобразователем частоты и используют тот же тип управления потоком статора, что и обычный АД. Роторы данных машин изготавливают из тонколистной электротехнической стали с пробитыми пазами таким образом, что бы они намагничивались с одной стороны меньше, чем с другой. Стремление магнитного поля ротора «соединится» с вращающимся магнитным потоком статора и создает вращающий момент.
Основным плюсом реактивных синхронных электродвигателей являются незначительные потери в роторе. Таким образом, хорошо спроектированная и работающая с правильно подобранным алгоритмом управления синхронная реактивная машина вполне способна соответствовать европейским стандартам премиум класса IE4 и NEMA, не используя при этом постоянных магнитов. Снижения тепловых потерь в роторе повышает крутящий момент и увеличивает плотность мощности, по сравнению с асинхронными машинами. Эти двигатели имеют низкий уровень шума благодаря низкому уровню пульсаций момента и вибраций.
Основным недостатком является низкий коэффициент мощности по сравнению с асинхронной машиной, что приводит к большей потребляемой мощности из сети. Это увеличивает затраты и ставит перед инженером сложную задачу, стоит ли применять реактивную машину или нет для конкретной системы?
Сложность в изготовлении ротора и его хрупкость делает невозможным применение реактивных электродвигателей для высокоскоростных операций.
Синхронные реактивные машины хорошо подходят для широкого спектра промышленных применений, которые не требуют больших перегрузок или высоких скоростей вращения, а также все чаще применяются для частотно-регулируемых насосов из-за повышенной их эффективности.
Вентильные реактивные электродвигатели
Вентильный реактивный двигатель (с английского SRM) создает вращающий момент за счет притягивания магнитных полей зубцов ротора к магнитному полю статора. Вентильные реактивные двигатели (ВРД) имеют относительно небольшое количество полюсов обмотки статора. Ротор имеет зубчатый профиль, что упрощает его конструкцию и улучшает создаваемое магнитное поле, в отличии от реактивных синхронных машин. В отличии от синхронных реактивных двигателей (СРД), ВРД используют импульсное возбуждение постоянного тока, что требует обязательное наличие специального преобразователя для их работы.
Для поддержания магнитного поля в ВРД необходимы токи возбуждения, что уменьшает плотность мощности по сравнению с электрическими машинами с постоянными магнитами (ПМ). Однако они все же имеют габаритные размеры меньшие, чем обычные АД.
Основным преимуществом вентильных реактивных машин является то, что ослабления магнитного поля происходит естественным образом при снижении тока возбуждения. Это свойство дает им большое преимущество в диапазоне регулирования при скоростях выше номинальной (диапазон устойчивой работы может достигать 10:1). Высокая эффективность присутствует у таких машин при работе на высоких скоростях и с малыми нагрузками. Также ВРД способны обеспечить удивительно постоянную эффективность в довольно широком диапазоне регулирования.
Вентильные реактивные машины обладают также довольно хорошей отказоустойчивостью. Без постоянных магнитов эти машины не генерируют неуправляемый ток и момент при неисправностях, а независимость фаз ВРД позволяет им работать с уменьшенной нагрузкой, но с повышенными пульсациями момента при выходе из строя какой-то из фаз. Это свойство может быть полезно, если проектировщики хотят повышенной надежности разрабатываемой системы.
Простая конструкция ВРД делает его прочным и недорогим в изготовлении. При его сборке не используются дорогие материалы, а ротор из нелегированной стали отлично подходит для суровых климатических условий и высоких скоростей вращения.
ВРД имеет коэффициент мощности меньший, чем ПМ или АД, но его преобразователю не нужно создавать выходное напряжение синусоидальной формы для эффективной работы машины, соответственно такие инверторы имеют меньшие частоты коммутации. Как следствие – меньшие потери в инверторе.
Основными недостатками вентильных реактивных машин являются наличие акустических шумов и вибрации. Но с этими недостатками довольно хорошо борются путем более тщательного проектирования механической части машины, улучшения электронного управления, а также механическое объединение двигатель – рабочий орган.
ВРД хорошо подходят для широкого спектра применения и их все чаще используют для обработки сверхпрочных материалов из-за большой перегрузочной способности и большого диапазона регулирования скоростей. Большая перегрузочная способность делает их все более привлекательными для использования в качестве тяговых электроприводов современных электромобилей. Также ВРД получили широкое распространение и в электробытовой технике.
elenergi.ru
В настоящее время широкой популярностью пользуются двигатели, работающие от электроэнергии
Об электродвигателе
Двигатели для электромобилей подразделяются на:
- синхронные;
- асинхронные.
Практически сила авто – несложная установка, которая в процессе функционирования оправдывает себя. При работе на нейтрале аккумулятор заряжается. КПД составляет почти 90%. Это значит, что объем выделяемой энергии полностью направлен на создание движения. Получается преобразование электрической энергии в механическую с излучением тепла.
Принцип работы
Имеется несколько особенностей двигателя:
- Перед непосредственным запуском крутящий момент максимальный. На основании этого показателя не следует производить зацепление за стартер либо за сцепление.
- Работа происходит в большом спектре оборотов. Поэтому установка коробки для переключения передач необязательна. Чтобы изменить направление вращения, следует переставить местами полярности, вследствие этого на задней передаче можно получить выигрыш.
О достоинствах конструкции:
- удобство и безопасность;
- гарантийные обязательства прочностных характеристик;
- компактность;
- простота в управлении;
- современность конструкции;
- доступность.
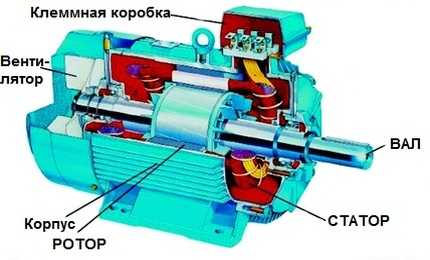
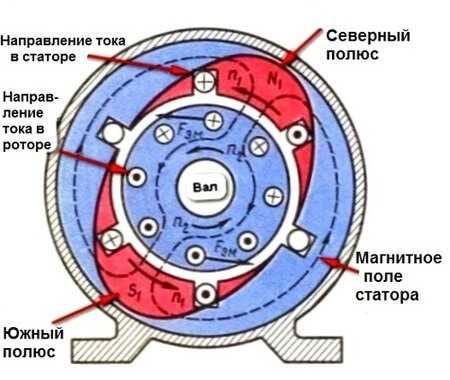
Для работы разных типов электродвигателей в основе лежит магнитная индукция. Как правило, такие конструкции состоят из ротора и статора. Элементарные познания электротехники указывают, что ротор – это крутящийся элемент, а статор – неподвижный. На катушки, размещенные на статоре, периодически поступает постоянный ток, а такое явление обеспечивает создание магнитного поля. В конструкции двигателя стоит элемент, необходимый для управления. Он производит отключение тока с одной катушки на другую. На основании этого процесса происходит вращение ротора. Его скоростной режим определяется частотой переключения создаваемых оборотов напряжения с первой катушки на вторую. Роторы для двигателя подразделяются на следующие виды:
- накоротко замкнутый;
- фазный, используемый при вращении для снижения скорости тока при запуске и для контроля крутящих скоростей. Подобные двигатели применяются в крановых системах, а забор энергии происходит от природы.
Для маломощных конструкций используется магнитный индуктор. Якорь – это элемент, обеспечивающий вращение двигателя. Такой тип имеет активацию обмотки и индуктора. Различие определяется лишь по качеству обмотки. На постоянном токе отсутствует сопротивление.
Виды двигателей
Электродвигатели, зависящие от природной энергии, делятся на группы, согласно заданным критериям. По моменту вращения:
- Гистерезисные. При этом постоянное вращение достигается при изменениях магнитного поля ротора. Такая группа не применяется в производственных процессах.
- Магнитоэлектрические. Их применение довольно актуально в производстве и потребительской сфере. К такой группе относятся конструкции переменного и постоянного показателей токов.
Электродвигатель для электромобиля постоянного тока представляет собой мотор, работающий на постоянном токе, а двигатель, функционирующий на переменном токе, называется двигателем непостоянного тока. Лишь только в скорости включения гармоники можно найти их отличия. В первом случае такая скорость приравнивается к количеству частоты оборотов. Во втором – эти скоростные характеристики имеют отличительные черты.
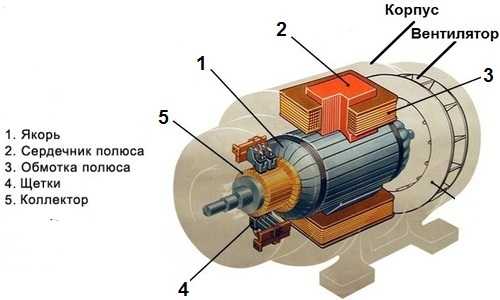
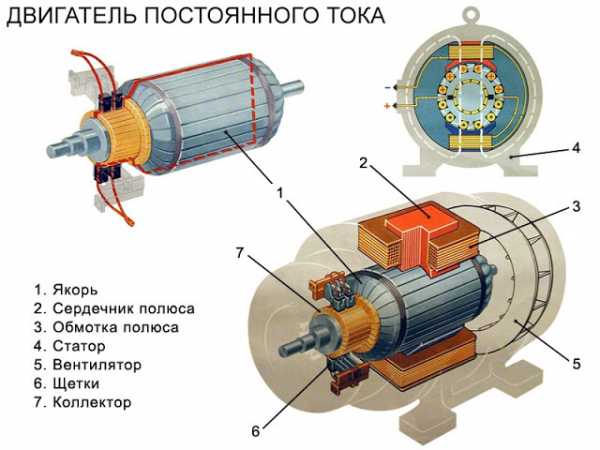
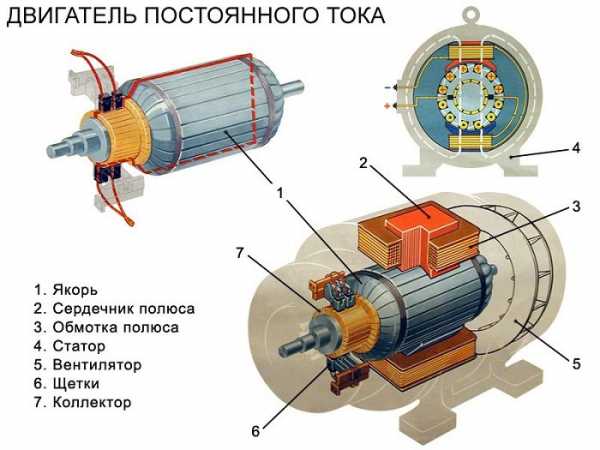
Электродвигатель на электромобиль неизменного тока состоит:
- из якоря;
- на нем устанавливается сердечник для полюса;
- на полюсе производится обмотка;
- из статора;
- вентиляционной установки;
- установленных щеток;
- коллектора для накапливания электрических зарядов.
Двигатели постоянного тока подразделяются на:
- Электродвигатель на электромобиль синхронного типа.Он напоминает мотор, функционирующий на переменном токе. Обеспечивает движение в такт с напряжением магнита. Такой тип больше подходит на электромобили с характеристиками мощности 100 и выше кВт. Одним из видов этих движков являются шаговые моторы, характеризующиеся угловым движением ротора. Питание подается на специально предназначенную обмотку. Для того чтобы обеспечить изменение положения ротора из одного места в иное, достаточно произвести перенаправление между линиями напряжений установленных обмоток.Вентильный двигатель – это одна из разновидностей синхронных. Его питание осуществляется через полупроводники.
- Асинхронный двигатель на электромобиле.Это мотор непостоянного тока, и скорость вращения ротора отличается от показателя магнитной индукции, которая, в свою очередь, создается напряжением. Именно эти движки обладают повышенным спросом.
Согласно узлу коллектора, различают:

- бесколлекторные;
- коллекторные.
В зависимости от вида активации:
- моторы, работающие от электрических или постоянных магнитов;
- самовозбуждающиеся от природных условий подвижные механизмы.
Разновидность двигателей также различается, от какой фазы он работает. Как правило, они бывают одно-, двух-, трех- и многофазными.
Новые разработки подобных механизмов можно приобрести в розничной продаже, а можно сконструировать самим.
Выбор двигателя
Новейшая технология производства позволяет выбрать нужный механизм для задания движения транспорту.
Критерии выбора:
- длительность рабочего цикла;
- мощность;
- потребление энергии;
- режимы работы;
- стоимость.
При непосредственном выборе двигателя немаловажно обратить внимание на ресурс работы и обслуживание, в том числе профилактические мероприятия. Сегодня они имеются как отечественного, так и зарубежного производства. Для выбора наиболее подходящей модели стоит получить консультацию специалиста.
‘; blockSettingArray[0][«setting_type»] = 6; blockSettingArray[0][«elementPlace»] = 2; blockSettingArray[1] = []; blockSettingArray[1][«minSymbols»] = 0; blockSettingArray[1][«minHeaders»] = 0; blockSettingArray[1][«text»] = ‘
‘; blockSettingArray[1][«setting_type»] = 6; blockSettingArray[1][«elementPlace»] = 0; blockSettingArray[3] = []; blockSettingArray[3][«minSymbols»] = 1000; blockSettingArray[3][«minHeaders»] = 0; blockSettingArray[3][«text»] = ‘
ekoenergia.ru
Двигатели для электромобилей: производители, устройство
Исчерпание углеводородного топлива, ухудшение экологической обстановки и ряд других причин рано или поздно заставят производителей разработать модели электромобилей, которые станут доступны для широких слоев населения. А пока остается только ждать или собственноручно разрабатывать варианты экологически чистой техники.
 Если же вы все-таки предпочитаете самостоятельно искать решения, а не дожидаться их со стороны, то вам понадобятся знания о том, какие двигатели для электромобиля уже изобрели, чем они отличаются и какой из них наиболее перспективный.
Если же вы все-таки предпочитаете самостоятельно искать решения, а не дожидаться их со стороны, то вам понадобятся знания о том, какие двигатели для электромобиля уже изобрели, чем они отличаются и какой из них наиболее перспективный.Тяговый двигатель
Если вы решите поставить обыкновенный электромотор под капот своего автомобиля, то, скорее всего, из этого ничего не выйдет. А все потому, что вам необходим тяговый электрический двигатель (ТЭД). От обычных электромоторов он отличается большей мощностью, способностью выдавать больший крутящий момент, небольшими габаритами и малой массой.
Для питания тягового электродвигателя используются батареи. Они могут подзаряжаться от внешних источников («от розетки»), от солнечных батарей, от генератора, установленного в авто, или в режиме рекуперации (самостоятельное восполнение заряда).
Двигатели для электромобилей чаще всего работают от литий-ионных батарей. ТЭД обычно функционирует в двух режимах – двигательном и генераторном. В последнем случае он восполняет потраченный запас электроэнергии при переходе на нейтральную скорость.
Принцип работы
Стандартный электродвигатель состоит из двух элементов – статора и ротора. Первый компонент является неподвижным, имеет несколько катушек, а второй совершает вращательные движения и передает усилие на вал. На катушки статора с определенной периодичностью подается переменный электрический ток, что вызывает появление магнитного поля, которое начинает вращать ротор.
 Чем чаще катушки «включаются-выключаются», тем быстрее вращается вал. В двигатели для электромобилей могут устанавливать два вида ротора:
Чем чаще катушки «включаются-выключаются», тем быстрее вращается вал. В двигатели для электромобилей могут устанавливать два вида ротора:- короткозамкнутый, на котором возникает магнитное поле, противоположное полю статора, за счет чего и происходит вращение;
- фазный – используется для уменьшения тока запуска и контроля скорости вращения вала, является наиболее распространенным.
Кроме того, в зависимости от скорости вращения магнитного поля и ротора двигатели могут быть асинхронными и синхронными. Тот или иной тип необходимо выбирать из имеющихся средств и поставленных задач.
Синхронный двигатель
Синхронный двигатель – это ТЭД, у которого скорость вращения ротора совпадает со скоростью вращения магнитного поля. Такие двигатели для электромобилей целесообразно использовать только в тех случаях, когда имеется источник повышенной мощности – от 100 кВт.
 Одной из разновидностей синхронных электромоторов является шаговый двигатель. Обмотка статора такой установки разбита на несколько секций. В определенный момент ток подается на определенную секцию, возникает магнитное поле, которое вращает ротор на определенный угол. Затем ток подается на следующую секцию, и процесс повторяется, вал начинает вращаться.
Одной из разновидностей синхронных электромоторов является шаговый двигатель. Обмотка статора такой установки разбита на несколько секций. В определенный момент ток подается на определенную секцию, возникает магнитное поле, которое вращает ротор на определенный угол. Затем ток подается на следующую секцию, и процесс повторяется, вал начинает вращаться.Асинхронный электромотор
В асинхронном двигателе скорость вращения магнитного поля не совпадает со скоростью вращения ротора. Плюсом таких устройств является ремонтопригодность – запчасти для электромобилей, оснащенных этими установками, найти очень просто. К другим преимуществам относятся:
- Простая конструкция.
- Простота обслуживания и эксплуатации.
- Низкая стоимость.
- Высокая надежность.
В зависимости от наличия щеточно-коллекторного узла двигатели могут быть коллекторными и безколлекторными. Коллектор – устройство, служащее для преобразования переменного тока в постоянный. Щетки служат для передачи электроэнергии на ротор.
 Безколлекторные двигатели для электромобилей отличаются меньшей массой, компактными габаритами и более высоким КПД. Они реже перегреваются и потребляют меньше электричества. Единственный минус такого двигателя – высокая цена на электронный блок, который выполняет функции коллектора. Кроме того, найти запчасти для электромобилей, оснащенных безколлекторным двигателем, сложнее.
Безколлекторные двигатели для электромобилей отличаются меньшей массой, компактными габаритами и более высоким КПД. Они реже перегреваются и потребляют меньше электричества. Единственный минус такого двигателя – высокая цена на электронный блок, который выполняет функции коллектора. Кроме того, найти запчасти для электромобилей, оснащенных безколлекторным двигателем, сложнее.Производители электродвигателей
Большинство самодельных электромобилей сконструировано с применением коллекторного двигателя. Это объясняется доступностью, низкой ценой и простым обслуживанием.
Видным производителем линейки данных моторов является немецкая компания Perm-Motor. Ее продукция способна к рекуперативному торможению в генераторном режиме. Она активно используется для оснащения скутеров, моторных лодок, легковых автомобилей, электроподъёмных устройств. Если двигатели Perm-Motor устанавливали в каждый электромобиль, цена их была бы значительно ниже. Сейчас они стоят в пределах 5-7 тыс. евро.
 Популярным производителем является компания Etek, которая занимается производством безщеточных и щеточных коллекторных двигателей. Как правило, это трехфазные моторы, работающие на постоянных магнитах. Основные преимущества установок:
Популярным производителем является компания Etek, которая занимается производством безщеточных и щеточных коллекторных двигателей. Как правило, это трехфазные моторы, работающие на постоянных магнитах. Основные преимущества установок:- точность управления;
- легкость организации рекуперации;
- высокая надежность за счет простой конструкции.
Завершает список производителей завод из США Advanced DC Motors, выпускающий коллекторные электромоторы. Некоторые модели обладают исключительной особенностью – они имеют второй шпиндель, что можно использовать для подключения на автомобиль-электромобиль дополнительного электрооборудования.
Какой двигатель выбрать
Чтобы покупка вас не разочаровала, надо сравнить характеристики приобретаемой модели с предъявляемыми требованиями к автомобилю. При выборе электродвигателя в первую очередь ориентируются на его тип:
- Синхронные установки имеют сложное устройство и дорогостоящи, но обладают перегрузочной способностью, ими легче управлять, им не страшны перепады напряжения, используются при высоких нагрузках. Они устанавливаются на электромобиль Mercedes.
- Асинхронные модели отличаются низкой стоимостью, простым устройством. Они просты в обслуживании и эксплуатации, однако выделяемая ими мощность намного меньше, чем тот же показатель синхронной установки.
На электромобиль цена будет значительно ниже, если электромотор будет работать в паре с двигателем внутреннего сгорания. На рынке такие комбинированные установки обладают большей популярностью, так как их стоимость составляет около 4-4,5 тыс. евро.
fb.ru
Устройство и принцип работы двигателя на постоянных магнитах
Двигатели на протяжении многих лет используются для преобразования электрической энергии в механическую различного типа. Эта особенность определяет столь высокую его популярность: обрабатывающие станки, конвейеры, некоторые бытовые приборы – электродвигатели различного типа и мощности, габаритных размеров используются повсеместно.
Основные показатели работы определяют то, какой тип конструкции имеет двигатель. Существует несколько разновидностей, некоторые пользуются популярностью, другие не оправдывают сложность подключения, высокую стоимость.
Двигатель на постоянных магнитах используют реже, чем асинхронный вариант исполнения. Для того, чтобы оценить возможности этого варианта исполнения, следует рассмотреть особенности конструкции, эксплуатационные качества и многое другое.
Устройство
 устройство
устройствоЭлектродвигатель на постоянных магнитах не сильно отличается по виду конструкции.
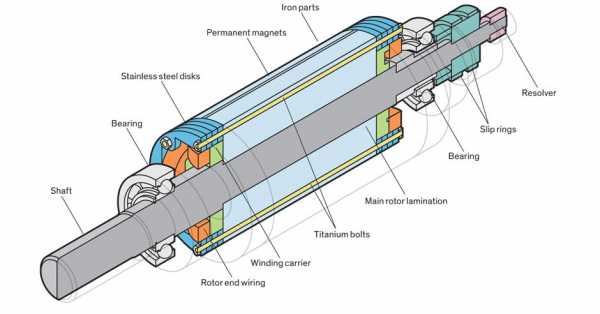
При этом, можно выделить следующие основные элементы:
- Снаружи используется электротехническая сталь, из которой изготавливается сердечник статора.
- Затем идет стержневая обмотка.
- Ступица ротора и за ней специальная пластина.
- Затем, изготовленные из электротехнической стали, секции редечника ротора.
- Постоянные магниты являются частью ротора.
- Конструкцию завершает опорный подшипник.
Как любой вращающийся электродвигатель, рассматриваемый вариант исполнения состоит из неподвижного статора и подвижного ротора, которые при подаче электроэнергии взаимодействую между собой. Отличие рассматриваемого варианта исполнения можно назвать наличие ротора, в конструкцию которого включены магниты постоянного типа.
При изготовлении статора, создается конструкция, состоящая из сердечника и обмотки. Остальные элементы являются вспомогательными и служат исключительно для обеспечения наилучших условий для вращения статора.
Принцип работы

Принцип работы рассматриваемого варианта исполнения основан на создании центробежной силы за счет магнитного поля, которое создается при помощи обмотки. Стоит отметить, что работа синхронного электродвигателя схожа с работой трехфазного асинхронного двигателя.
К основным моментам можно отнести:
- Создаваемое магнитное поле ротора вступает во взаимодействие с подаваемым током на обмотку статора.
- Закон Ампера определяет создание крутящего момента, который и заставляет выходной вал вращаться вместе с ротором.
- Магнитное поле создается установленными магнитами.
- Синхронная скорость вращения ротора с создаваемым полем статора определяет сцепление полюса магнитного поля статора с ротором. По этой причине, рассматриваемый двигатель нельзя использовать в трехфазной сети напрямую.
В данном случае, нужно в обязательном порядке устанавливать специальный блок управления.
Виды
 В зависимости от особенностей конструкции, существует несколько типов синхронных двигателей. При этом, они обладают разными эксплуатационными качествами.
В зависимости от особенностей конструкции, существует несколько типов синхронных двигателей. При этом, они обладают разными эксплуатационными качествами.
По типу установки ротора, можно выделить следующие типы конструкции:
- С внутренней установкой – наиболее распространенный тип расположения.
- С внешней установкой или электродвигатель обращенного типа.
Постоянные магниты включены в конструкцию ротора. Их изготавливают из материала с высокой коэрцитивной силой.
Эта особенность определяет наличие следующих конструкций ротора:
- Со слабо выраженным магнитным полюсом.
- С ярко выраженным полюсом.
Равная индуктивность по перечным и продольным осям – свойство ротора с неявно выраженным полюсом, а у варианта исполнения с ярко выраженным полюсом подобной равности нет.
Кроме этого, конструкция ротора может быть следующего типа:
- Поверхностная установка магнитов.
- Встроенное расположение магнитов.
Кроме ротора, также следует обратить внимание и на статор.
По типу конструкции статора, можно разделить электродвигатели на следующие категории:
- Распределенная обмотка.
- Сосредоточенная обмотка.
По форме обратной обмотке, можно провести нижеприведенную классификацию:
- Синусоида.
- Трапецеидальная.
Подобная классификация оказывает влияние на работу электродвигателя.
Преимущества и недостатки
Рассматриваемый вариант исполнения имеет следующие достоинства:
- Оптимальный режим работы можно получить при воздействии реактивной энергии, что возможно при автоматической регулировке тока. Эта особенность обуславливает возможность работы электродвигателя без потребления и отдачи реактивной энергии в сеть. В отличие от асинхронного двигателя, синхронный имеет небольшие габаритные размеры при той же мощности, но при этом КПД значительно выше.
- Колебания напряжения в сети в меньшей степени воздействую на синхронный двигатель. Максимальный момент пропорционален напряжению сети.
- Высокая перегрузочная способность. Путем повышения тока возбуждения, можно провести значительное повышение перегрузочной способности. Это происходит на момент резкого и кратковременного возникновения дополнительной нагрузки на выходном валу.
- Скорость вращения выходного вала остается неизменной при любой нагрузке, если она не превышает показатель перегрузочной способности.
К недостаткам рассматриваемой конструкции можно отнести более сложную конструкцию и вследствие этого более высокую стоимость, чем у асинхронных двигателей. Однако в некоторых случаях, обойтись без данного типа электродвигателя невозможно.
Как сделать своими руками?
Провести создание электродвигателя своими руками можно только при наличии знаний в области электротехнике и наличия определенного опыта. Конструкция синхронного варианта исполнения должна быть высокоточной для исключения возникновения потерь и правильности работы системы.
 Зная то, как должна выглядеть конструкция, проводим следующую работу:
Зная то, как должна выглядеть конструкция, проводим следующую работу:
- Создается или подбирается выходной вал. Он не должен иметь отклонений или других дефектов. В противном случае, возникающая нагрузка может привести к искривлению вала.
- Наибольшей популярностью пользуются конструкции, когда обмотка находится снаружи. На посадочное место вала устанавливается статор, который имеет постоянные магниты. На валу должно быть предусмотрено место для шпонки для предотвращения прокручивания вала при возникновении серьезной нагрузки.
- Ротор представлен сердечником с обмоткой. Создать самостоятельно ротор достаточно сложно. Как правило, он неподвижен, крепится к корпусу.
- Механической связи между статором и ротором нет, так как в противном случае, при вращении будет создавать дополнительная нагрузка.
- Вал, на котором крепится статор, также имеет посадочные места для подшипников. В корпусе имеется посадочные места для подшипников.
Большая часть элементов конструкции создать своими руками практически невозможно, так как для этого нужно иметь специальное оборудование и большой опыт работы. Примером можно назвать как подшипники, так и корпус, статор или ротор. Они должны иметь точные размеры. Однако, при наличии необходимых элементов конструкции, сборку можно провести и самостоятельно.
Электродвигатели имеют сложную конструкцию, питание от сети 220 Вольт обуславливает соблюдение определенных норм при их создании. Именно поэтому, для того, чтобы быть уверенным в надежной работе подобного механизма, следует покупать варианты исполнения, созданные на заводах по выпуску подобного оборудования.
В научных целях, к примеру, в лаборатории для проведения испытаний по работе магнитного поля часто создают собственные двигатели. Однако они имеют небольшую мощность, питаются от незначительно напряжения и не могут быть применены в производстве.
Рекомендации

Выбор рассматриваемого электродвигателя следует проводить с учетом следующих особенностей:
- Мощность – основной показатель, который влияет на срок службы. При возникновении нагрузки, которая превосходит возможности электродвигателя, он начинает перегреваться. При сильной нагрузке, возможно искривление вала и нарушение целостности других компонентов системы. Поэтому следует помнить о том, что диаметр вала и другие показатели выбираются в зависимости от мощности двигателя.
- Наличие системы охлаждения. Обычно особого внимания на то, как проводится охлаждение, никто не уделяет. Однако при постоянной работе оборудования, к примеру под солнцем, следует задуматься о том, что модель должна быть предназначена для продолжительной работы под нагрузкой при тяжелых условиях.
- Целостность корпуса и его вид, год выпуска – основные моменты, на которые уделяют внимание при покупке двигателя бывшего употребления. Если имеются дефекты корпуса, велика вероятность того, что конструкция имеет повреждения и внутри. Также, не стоит забывать о том, что подобное оборудование с годами теряет свой КПД.
- Особое внимание нужно уделять корпусу, так как в некоторых случаях можно провести крепление только в определенном положении. Самостоятельно создать посадочные отверстия, приварить уши для крепления практически невозможно, так как нарушение целостности корпуса не допускается.
- Вся информация об электродвигателе находится на пластине, которая прикрепляется к корпусу. В некоторых случаях, есть только маркировка, по расшифровке которой можно узнать основные показатели работы.
В заключение отметим, что многие двигатели, которые были произведены несколько десятилетий назад, зачастую проходили восстановительные работы. От качества проведенной восстановительной работы зависят показатели электродвигателя.
slarkenergy.ru
История создания электродвигателя
Электромеханика является относительно молодой, по историческим меркам, отраслью науки и техники.
1800, Вольта
Итальянский физик, химик и физиолог, Алессандро Вольта, первый в мире создал химический источник тока.
1820, Эрстед
Датский ученый, физик, Ханс Кристиан Эрстед, обнаружил на опыте отклоняющее действие тока на магнитную стрелку.
1821, Фарадей
Первый электродвигатель Фарадея, 1821 г.
Британский физик-экспериментатор и химик, Майкл Фарадей, опубликовал трактат «О некоторых новых электромагнитных движениях и о теории магнетизма», где описал, как заставить намагниченную стрелку непрерывно вращаться вокруг одного из магнитных полюсов. Эта конструкция впервые реализовала непрерывное преобразование электрической энергии в механическую. Принято считать ее первым электродвигателем в истории.
1822, Ампер
Французский физик, Андре Мари Ампер, открыл магнитный эффект соленоида (катушки с током), откуда следовала идея эквивалентности соленоида постоянному магниту. Среди прочего Ампер предложил использовать железный сердечник, помещенный внутрь соленоида, для усиления магнитного поля. В 1820 году им был открыт закон Ампера.
1822, Барлоу
Английский физик и математик, Питер Барлоу, изобрел колесо Барлоу, по сути, униполярный электродвигатель.
1825, Араго
Французский физик и астроном, Доминик Франсуа Жан Араго, опубликовал опыт показывающий, что вращающийся медный диск заставляет вращаться магнитную стрелку, подвешенную над ним.
1825, Стёрджен
Британский физик, электротехник и изобретатель, Уильям Стёрджен, в 1825 изготовил первый электромагнит, который представлял из себя согнутый стержень из мягкого железа с обмоткой из толстой медной проволоки.
Вращающееся устройство Йедлика, 1827/28 гг.
1827, Йедлик
Венгерский физик и электротехник, Аньош Иштван Йедлик, изобрел первую в мире динамо-машину (генератор постоянного тока), однако практически не объявлял о своем изобретении до конца 1850-х годов.
1831, Фарадей
Английский физик, Майкл Фарадей, открыл электромагнитную индукцию, то есть явление возникновения электрического тока в замкнутом контуре при изменении магнитного потока, проходящего через него. Формулировка закона электромагнитной индукции.
1831, Генри
Американский физик, Джозеф Генри, независимо от Фарадея обнаружил взаимоиндукцию, но Фарадей раньше опубликовал свои результаты.
1832, Пикси
Генератор постоянного тока Пикси
Француз, Ипполит Пикси, сконструировал первый генератор переменного тока. Устройство состояло из двух катушек индуктивности с железным сердечником напротив которых располагался вращающийся магнит подковообразной формы, который приводился в движение вращением рычага. Позже для получения постоянного пульсирующего тока к этому устройству был добавлен коммутатор.

Электродвигатель Стёрджена
Strurgejn’s Annals of Electricity, 1836/37, vol. 1
1833, Стёрджен
Британский физик, Уильям Стёрджен, публично продемонстрировал электродвигатель на постоянном токе в Марте 1833 года в Аделаидской галерее практической науки в Лондоне. Данное изобретение считается первым электродвигателем, который можно было использовать.
1833, Ленц
В начале в электромеханике разграничивали магнито-электрические машины (электрические генераторы) и электро-магнитные машины (электрические двигатели). Российский физик (немецкого происхождения), Эмилий Христианович Ленц, опубликовал статью о законе взаимности магнито-электрических явлений, то есть о взаимозаменяемости электрического двигателя и генератора.
Май 1834, Якоби
Первый вращающийся электродвигатель. Якоби, 1834
Немецкий и русский физик, академик Императорской Санкт-Петербургской Академии Наук, Борис Семенович (Мориц Герман фон) Якоби, изобрел первый в мире электродвигатель с непосредственным вращением рабочего вала. Мощность двигателя составляла около 15 Вт, частота вращения ротора 80-120 оборотов в минуту. До этого изобретения существовали только устройства с возвратно-поступательным или качательным движением якоря.
1836 — 1837, Дэвенпорт
Проводя эксперименты с магнитами, американский кузнец и изобретатель, Томас Дэвенпорт, создает свой первый электромотор в июле 1834 года. В декабре этого же года он впервые продемонстрировал свое изобретение. В 1837 году Дэвенпорт получил первый патент (патент США №132) на электрическую машину.
1839, Якоби
Используя электродвигатель питающийся от 69 гальванических элементов Грове и развивающий 1 лошадиную силу, в 1839 г. Якоби построил лодку способную двигаться с 14 пассажирами по Неве против течения. Это было первое практическое применение электродвигателя.
1837 — 1842, Дэвидсон
Шотландский изобретатель, Роберт Дэвидсон, занимался разработкой электродвигателя с 1837 года. Он сделал несколько приводов для токарного станка и моделей транспортного средства. Дэвидсон изобрел первый электрический локомотив.
1856, Сименс
Немецкий инженер, изобретатель, ученый, промышленник, основатель фирмы Siemens, Вернер фон Сименс изобрел электрический генератор с двойным T-образным якорем. Он первый разместил обмотки в пазах.
1861-1864, Максвелл
Британский физик, математик и механик, Джеймс Клерк Максвелл, обобщил знания об электромагнетизме в четырех фундаментальных уравнениях. Вместе с выражением для силы Лоренца уравнения Максвелла образуют полную систему уравнений классической электродинамики.
1871-1873, Грамм
Бельгийский изобретатель, Зеноб Теофил Грамм, устранил недостаток электрических машин с двух-Т-образным якорем Сименса, который заключался в сильных пульсациях вырабатываемого тока и быстром перегреве. Грамм предложил конструкцию генератора с самовозбуждением, который имел кольцевой якорь.
1885, Феррарис
Итальянский физик и инженер, Галилео Феррарис, изобрел первый двухфазный асинхронный электродвигатель. Однако Феррарис думал, что такой двигатель не сможет иметь КПД выше 50%, поэтому он потерял интерес и не продолжал улучшать асинхронный электродвигатель. Считается, что Феррарис первым объяснил явление вращающегося магнитного поля.
1887, Тесла
Американец сербского происхождения, изобретатель, Никола Тесла, работая независимо от Феррариса, изобрел и запатентовал двухфазный асинхронный электродвигатель с явно выраженными полюсами статора (сосредоточенными обмотками). Тесла ошибачно считал что двухфазная система токов оптимальна с экономической точки зрения среди всех многофазных систем.
1889-1891, Доливо-Добровольский
Русский электротехник польского происхождения, Михаил Осипович Доливо-Добровольский, прочитав доклад Феррариса о вращающемся магнитном поле изобрел ротор в виде «беличьей клетки». Дальнейшая работа в этом направлении привела к разработке трехфазной системы переменных токов и трехфазного асинхронного электродвигателя, получившего широкое применение в промышленности и практически не изменившегося до нашего времени.
Широкое внедрение электромеханических устройств в России начинается после Октябрьской революции 1917 г., когда электрификация всей страны стала основой технической политики нового государства. Можно сказать, что XX век стал веком становления и широкого распространения электромеханики.
Выбор между двухфазной и трехфазной системой
Доливо-Добровольский справедливо считал, что увеличение числа фаз в двигателе улучшает распределение намагничивающей силы по окружности статора. Переход к трехфазной системы от двухфазной уже дает большой выигрыш в этом отношении. Дальнейшее увеличение числа фаз нецелесообразно, так как приводит к значительному увеличению расходов металла на провода.
Для Теслы же казалось очевидным, что чем меньше число фаз, тем меньше требуется проводов, и следовательно тем дешевле устройство электропередачи. При этом двухфазная система передачи требовала применения четырех проводов, что представлялось не желательным в сравнении с двух проводными системами постоянного или однофазного переменного токов. Поэтому Тесла предлагал применять трех проводную линию для двухфазной системы, делая один провод общим. Но это не сильно уменьшало количество затрачиваемого на систему металла, так как общий провод должен был быть большего сечения.
Таким образом трехфазная система токов предложенная Доливо-Добровольским была оптимальной для передачи энергии. Она практически сразу нашла широкое применение в промышленности и до наших дней является основной системой передачи электрической энергии во всем мире.
engineering-solutions.ru
Коллекторный двигатель: виды, принцип работы, схемы
В бытовом электрооборудовании, где используются электродвигатели, как правило, устанавливаются электромашины с механической коммутацией. Такой тип двигателей называют коллекторными (далее КД). Предлагаем рассмотреть различные виды таких устройств, их принцип действия и конструктивные особенности. Мы также расскажем о достоинствах и недостатках каждого из них, приведем примеры сферы применения.
Что такое коллекторный двигатель?
Под таким определением подразумевается электромашина, преобразовывающая электроэнергию в механическую, и наоборот. Конструкция устройства предполагает наличие хотя бы одной обмотки подсоединенной к коллектору (см. рис. 1).
 Рисунок 1. Коллектор на роторе электродвигателя (отмечен красным)
Рисунок 1. Коллектор на роторе электродвигателя (отмечен красным)В КД данный элемент конструкции используется для переключения обмоток и в качестве датчика, позволяющего определить положение якоря (ротора).
Виды КД
Классифицировать данные устройства принято по типу питания, в зависимости от этого различают две группы КД:
- Постоянного тока. Такие машины отличаются высоким пусковым моментом, плавным управлением частоты вращения и относительно простой конструкцией.
- Универсальные. Могут работать как от постоянного, так и переменного источника электроэнергии. Отличаются компактными размерами, невысокой стоимостью и простотой управления.
Первые, делятся на два подвида, в зависимости от организации индуктора он может быть на постоянных магнитах или специальных катушках возбуждения. Они служат для создания магнитного потока, необходимого для образования вращательного момента. КД, где используются катушки возбуждения, различают по типам обмоток, они могут быть:
- независимыми;
- параллельными;
- последовательными;
- смешанными.
Разобравшись с видами, рассмотрим каждый из них.
КД универсального типа
На рисунке ниже представлен внешний вид электромашины данного типа и ее основные элементы конструкции. Данное исполнение характерно практически для всех КД.
 Конструкция универсального коллекторного двигателя
Конструкция универсального коллекторного двигателяОбозначения:
- А – механический коммутатор, его также называют коллектором, его функции были описаны выше.
- В – щеткодержатели, служат для крепления щеток (как правило, из графита), через которые напряжение поступает на обмотки якоря.
- С – Сердечник статора (набирается из пластин, материалом для которых служит электротехническая сталь).
- D – Обмотки статора, данный узел относится к системе возбуждения (индуктору).
- Е – Вал якоря.
У устройств данного типа, возбуждение может быть последовательным и параллельным, но поскольку последний вариант сейчас не производят, мы его не будем рассматривать. Что касается универсальных КД последовательного возбуждения, то типовая схема таких электромашин представлена ниже.
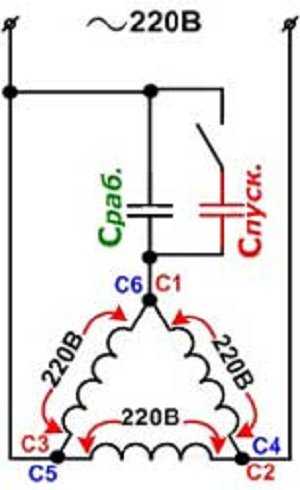 Схема универсального коллекторного двигателя
Схема универсального коллекторного двигателяУниверсальный КД может работать от переменного напряжения благодаря тому, что когда происходит смена полярности, ток в обмотках возбуждения и якоря также меняет направление. В результате этого вращательный момент не изменяет своего направления.
Особенности и область применения универсальных КД
Основные недостатки данного устройства проявляются при его подключении к источникам переменного напряжения, что отражается в следующем:
- снижение КПД;
- повышенное искрообразование в щеточно-коллекторном узле, и как следствие, его быстрый износ.
Ранее КД широко применялись, во многих бытовых электроприборах (инструмент, стиральные машины, пылесосы и т.д.). На текущий момент производители практически престали использовать данный тип двигателей отдав предпочтение безколлекторным электромашинам.
Теперь рассмотрим коллекторные электромашины, работающие от источников постоянного напряжения.
КД с индуктором на постоянных магнитах
Конструктивно такие электромашины отличаются от универсальных тем, что вместо катушек возбуждения используются постоянные магниты.
 Конструкция коллекторного двигателя на постоянных магнитах и его схема
Конструкция коллекторного двигателя на постоянных магнитах и его схемаЭтот вид КД получил наибольшее распространение по сравнению с другими электромашинами данного типа. Это объясняется невысокой стоимостью вследствие простоты конструкции, простым управлением скорости вращения (зависит от напряжения) и изменением его направления (достаточно изменить полярность). Мощность двигателя напрямую зависит от напряженности поля, создаваемого постоянными магнитами, что вносит определенные ограничения.
Основная сфера применения – маломощные приводы для различного оборудования, часто используется в детских игрушках.
 КД на постоянных магнитах с игрушки времен СССР
КД на постоянных магнитах с игрушки времен СССРК числу преимуществ можно отнести следующие качества:
- высокий момент силы даже на низкой частоте оборотов;
- динамичность управления;
- низкая стоимость.
Основные недостатки:
- малая мощность;
- потеря магнитами своих свойств от перегрева или с течением времени.
Для устранения одного из основных недостатков данных устройств (старения магнитов) в системе возбуждения используются специальные обмотки, перейдем к рассмотрению таких КД.
Независимые и параллельные катушки возбуждения
Первые получили такое название вследствие того, что обмотки индуктора и якоря не подключаются друг к другу и запитываются отдельно (см. А на рис. 6).
Рисунок 6. Схемы КД с независимой (А) и параллельной (В) обмоткой возбужденияОсобенность такого подключения заключается в том, что питание U и UK должны отличаться, в противном случае н возникнет момент силы. Если невозможно организовать такие условия, то катушки якоря и индуктора подключается параллельно (см. В на рис. 6). Оба вида КД обладают одинаковыми характеристиками, мы сочли возможным объединить их в одном разделе.
Момент силы у таких электромашин высокий при низкой частоте вращения и уменьшается при ее увеличении. Характерно, что токи якоря и катушки независимы, а общий ток является суммой токов, проходящих через эти обмотки. В результат этого, при падении тока катушки возбуждения до 0, КД с большой вероятностью выйдет из строя.
Сфера применения таких устройств – силовые установки с мощностью от 3 кВт.
Положительные черты:
- отсутствие постоянных магнитов снимает проблему их выхода из строя с течением времени;
- высокий момент силы на низкой частоте вращения;
- простое и динамичное управление.
Минусы:
- стоимость выше, чем у устройств на постоянных магнитах;
- недопустимость падения тока ниже порогового значения на катушке возбуждения, поскольку это приведет к поломке.
Последовательная катушка возбуждения
Схема такого КД представлена на рисунке ниже.
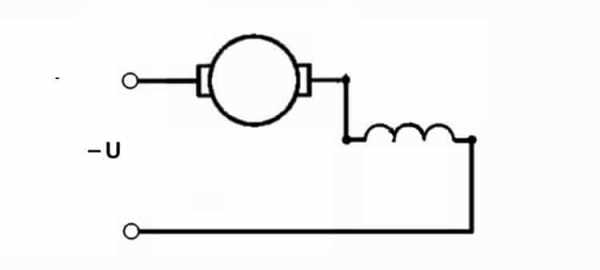 Схема КД с последовательным возбуждением
Схема КД с последовательным возбуждениемПоскольку обмотки включены последовательно, то ток в них будет равным. В результате этого, когда ток в обмотке статора становится меньше, чем номинальный (это происходит при небольшой нагрузке), уменьшается мощность магнитного потока. Соответственно, когда нагрузка увеличивается, пропорционально увеличивается мощность потока, вплоть до полного насыщения магнитной системы, после чего эта зависимость нарушается. То есть, в дальнейшем рост тока в обмотке катушки якоря не приводит к увеличению магнитного потока.
Указанная выше особенность проявляется в том, что КД данного типа непозволительно запускать при нагрузке на четверть меньше номинальной. Это может привести к тому, что ротор электромашины резко увеличит частоту вращения, то есть, двигатель пойдет «в разнос». Соответственно, такая особенность вносит ограничения на сферу применения, например, в механизмах с ременной передачей. Это связано с тем, что при ее обрыве электромашина начинает работать в холостом режиме.
Указанная особенность не распространяется на устройства, чья мощность менее 200 Вт, для них допустимы падения нагрузки вплоть до холостого режима работы.
Преимущества КД с последовательной катушкой, такие же, как у предыдущей модели, за исключением простоты и динамичности управления. Что касается минусов, то к ним следует отнести:
- высокую стоимость в сравнении с аналогами на постоянных магнитах;
- низкий уровень момента силы при высокой частоте оборотов;
- поскольку обмотки статора и возбуждения подключены последовательно, возникают проблемы с управлением скоростью вращения;
- работа без нагрузки приводит к поломке КД.
Смешанные катушки возбуждения
Как видно из схемы, представленной на рисунке ниже, индуктор на КД данного типа обладает двумя катушками, подключенных последовательно и параллельно обмотке ротора.
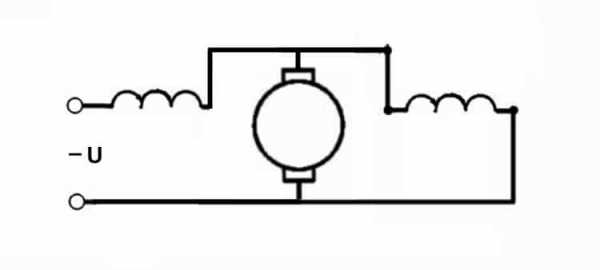 Схема КД со смешанными катушками возбуждения
Схема КД со смешанными катушками возбужденияКак правило, одна из катушек обладает большей намагничивающей силой, поэтому она считается, как основная, соответственно, вторая – дополнительная (вспомогательная). Допускается встречное и согласованное включение катушек, в зависимости от этого интенсивность магнитного потока соответствует разности или сумме магнитных сил каждой обмотки.
При встречном включении характеристики КД становятся близкими к соответствующим показателям электромашин с последовательным или параллельным возбуждением (в зависимости от того, какая из катушек является основной). То есть, такое включение актуально, если необходимо получить результат в виде неизменной частоты оборотов или их увеличению при возрастании нагрузки.
Согласованное включение приводит к тому, что характеристики КД будут соответствовать среднему значению показателями электромашин с параллельными и последовательными катушками возбуждения.
Единственный недостаток такой конструкции – самая высокая стоимость в сравнении с другими типами КД. Цена оправдывается благодаря следующими положительными качествами:
- не устаревают магниты, за отсутствием таковых;
- малая вероятность выхода из строя при нештатных режимах работы;
- высокий момент силы на низкой частоте вращения;
- простое и динамичное управление.
www.asutpp.ru
Схема подключения однофазного электродвигателя на 220 вольт через конденсатор
Нередки случаи, когда необходимо подключить электродвигатель к сети 220 вольт — это происходит при попытках приобщить оборудование к своим нуждам, но схема не отвечает техническим характеристикам, указанным в паспорте такого оборудования. Мы постараемся разобрать в этой статье основные приемы решения проблемы и представим несколько альтернативных схем с описанием для подключения однофазного электродвигателя с конденсатом на 220 вольт.
Почему так происходит? Например, в гараже необходимо подключение асинхронного электродвигателя на 220 вольт, который рассчитан на три фазы. При этом необходимо сохранить КПД (коэффициент полезного действия), так поступают в случае, если альтернативы (в виде движка) просто не существует, потому как в схеме на три фазы легко образуется вращающееся магнитное поле, которое обеспечивает создание условий для вращения ротора в статоре. Без этого КПД будет меньше, по сравнению с трехфазной схемой подключения.
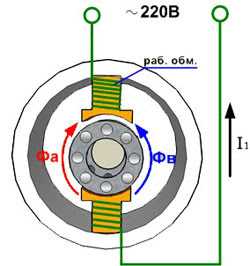
Когда в однофазных движках присутствует только одна обмотка, мы наблюдаем картину, когда поле внутри статора не вращается, а пульсирует, то есть толчок для пуска не происходит, пока собственноручно не раскрутить вал. Для того чтобы вращение могло происходить самостоятельно, добавляем вспомогательную пусковую обмотку. Это вторая фаза, она перемещена на 90 градусов и толкает ротор при включении. При этом двигатель все равно включен в сеть с одной фазой, так что название однофазного сохраняется. Такие однофазные синхронные моторы имеют рабочую и пусковую обмотки. Разница в том, что пусковая действует только при включении заводя ротор, работая всего три секунды. Вторая же обмотка включена все время. Для того чтобы определить где какая, можно использовать тестер. На рисунке можно увидеть соотношение их со схемой в целом.
Подключение электродвигателя на 220 вольт: мотор запускается путем подачи 220 вольт на рабочую и пусковую обмотки, а после набора необходимых оборотов нужно вручную отключить пусковую. Для того чтобы фазу сдвинуть, необходимо омическое сопротивление, которое и обеспечивают конденсаторы индуктивности. Встречается сопротивление как в виде отдельного резистора, так и в части самой пусковой обмотки, которая выполняется по бифилярной технике. Она работает так: индуктивность катушки сохраняется, а сопротивление становиться больше из-за удлиненного провода из меди. Такую схему можно наблюдать на рисунке 1: подключение электродвигателя 220 вольт.
Рисунок 1. Схема подключения электродвигателя 220 вольт с конденсатором
Существуют также моторы, у которых обе обмотки непрерывно подключены к сети, они называются двухфазные, потому как поле внутри вращается, а конденсатор предусмотрен, чтобы сдвигать фазы. Для работы такой схемы, обе обмотки имеют провод с равным друг другу сечением.
Схема подключения коллекторного электродвигателя на 220 вольт
Где можно встретить в быту?
Электрические дрели, некоторые стиральные машинки, перфораторы и болгарки имеют синхронный коллекторный двигатель. Он способен работать в сетях с одной фазой даже без пусковых механизмов. Схема такая: перемычкой соединяются концы 1 и 2, первый берет начало в якоре, второй – в статоре. Два кончика, которые остались, необходимо присоединить к питанию в 220 вольт.
Подключение электродвигателя 220 вольт с пусковой обмоткой
Внимание!
- Такая схема исключает блок электроники, а следовательно – мотор сразу же с момента старта, будет работать на полную мощность – на максимальных оборотах, при запуске буквально срываясь с силой от пускового электротока, который вызывает искры в коллекторе;
- существуют электромоторы с двумя скоростями. Их можно определить по трем концам в статоре, выходящим из обмотки. В этом случае скорость вала при подключении уменьшается, а риск деформации изоляции при старте – увеличивается;
- направление вращения можно изменить, для этого следует поменять местами окончания подключения в статоре или якоре.
Схема подключения электродвигателя 380 на 220 вольт с конденсатором
Есть еще один вариант подключения электродвигателя мощность в 380 Вольт, который приходит в движение без нагрузки. Для этого также необходим конденсатор в рабочем состоянии.
Один конец подключается к нулю, а второй — к выходу треугольника с порядковым номером три. Чтобы изменить направление вращения электромотора, стоит подключить его к фазе, а не к нулю.
Схема подключения электродвигателя 220 вольт через конденсаторы
В случае когда мощность двигателя более 1,5 Киловатта или он при старте работает сразу с нагрузкой, вместе с рабочим конденсатором необходимо параллельно установить и пусковой. Он служит увеличению пускового момента и включается всего на несколько секунд во время старта. Для удобства он подключается с кнопкой, а все устройство — от электропитания через тумблер или кнопку с двумя позициями, которая имеет два фиксированных положения. Для того чтобы запустить такой электромотор, необходимо все подключить через кнопку (тумблер) и держать кнопку старта, пока он не запустится. Когда запустился – просто отпускаем кнопку и пружина размыкает контакты, отключая стартер
Специфика заключается в том, что асинхронные двигатели изначально предназначаются для подключения к сети с тремя фазами в 380 В или 220 В.
Важно! Для того чтобы подключить однофазный электромотор в однофазную сеть, необходимо ознакомиться с данными мотора на бирке и знать следующее:
Р = 1,73 * 220 В * 2,0 * 0,67 = 510 (Вт) расчет для 220 В
Р = 1,73 * 380 * 1,16 * 0,67 =510,9 (Вт) расчет для 380 В
По формуле становится понятно, что электрическая мощность превосходит механическую. Это необходимый запас для компенсации потерь мощности при старте — создании вращающегося момента магнитного поля.
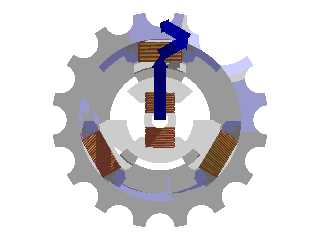
Существуют два типа обмотки — звездой и треугольником. По информации на бирке мотора можно определить какая система в нем использована.
Это схема обмотки звездой
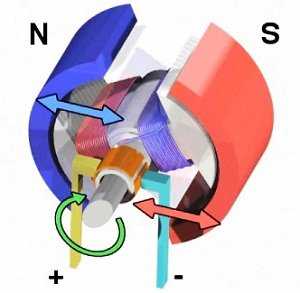
Красные стрелки — это распределение напряжения в обмотках мотора, говорит о том, что на одной обмотке распределяется напряжение единичной фазы в 220 В, а двух других — линейного напряжения 380 В. Такой двигатель можно приспособить под однофазную сеть по рекомендациям на бирке: узнать для какого напряжения созданы обмотки, можно соединять их звездой или треугольником.
Схема обмотки треугольником проще. По возможности лучше применить ее, так как двигатель будет терять мощность в меньшем количестве, а напряжение по обмоткам всюду будет равно 220 В.
Это схема подключения с конденсатором асинхронного двигателя в однофазную сеть. Включает рабочие и пусковые конденсаторы.
Пример:
- применяем конденсаторы, ориентируясь на напряжение, минимум 300 или 400 В;
- емкость рабочих конденсаторов набирается путем параллельного их соединения;
- вычисляем таким образом: каждые 100 Вт — это еще 7 мкФ, учитывая, что 1 кВт равен 70 мкФ;
- это пример параллельного соединения конденсаторов
- емкость для пуска должна превышать в три раза емкость рабочих конденсаторов.
Важно! Если при старте не отключить вовремя пусковые конденсаторы, когда мотор наберет стандартные для него обороты, они приведут к большому перекосу по току во всех обмотках, что попросту заканчивается перегревом электромотора.
После прочтения статьи, рекомендуем ознакомиться с техникой подключения трехфазного двигателя в однофазную сеть:
bouw.ru